DASC Lab
Home
People
Papers
Projects
Code
Search
Search
Haejoon Lee
Haejoon Lee
link
/
email
/
Papers
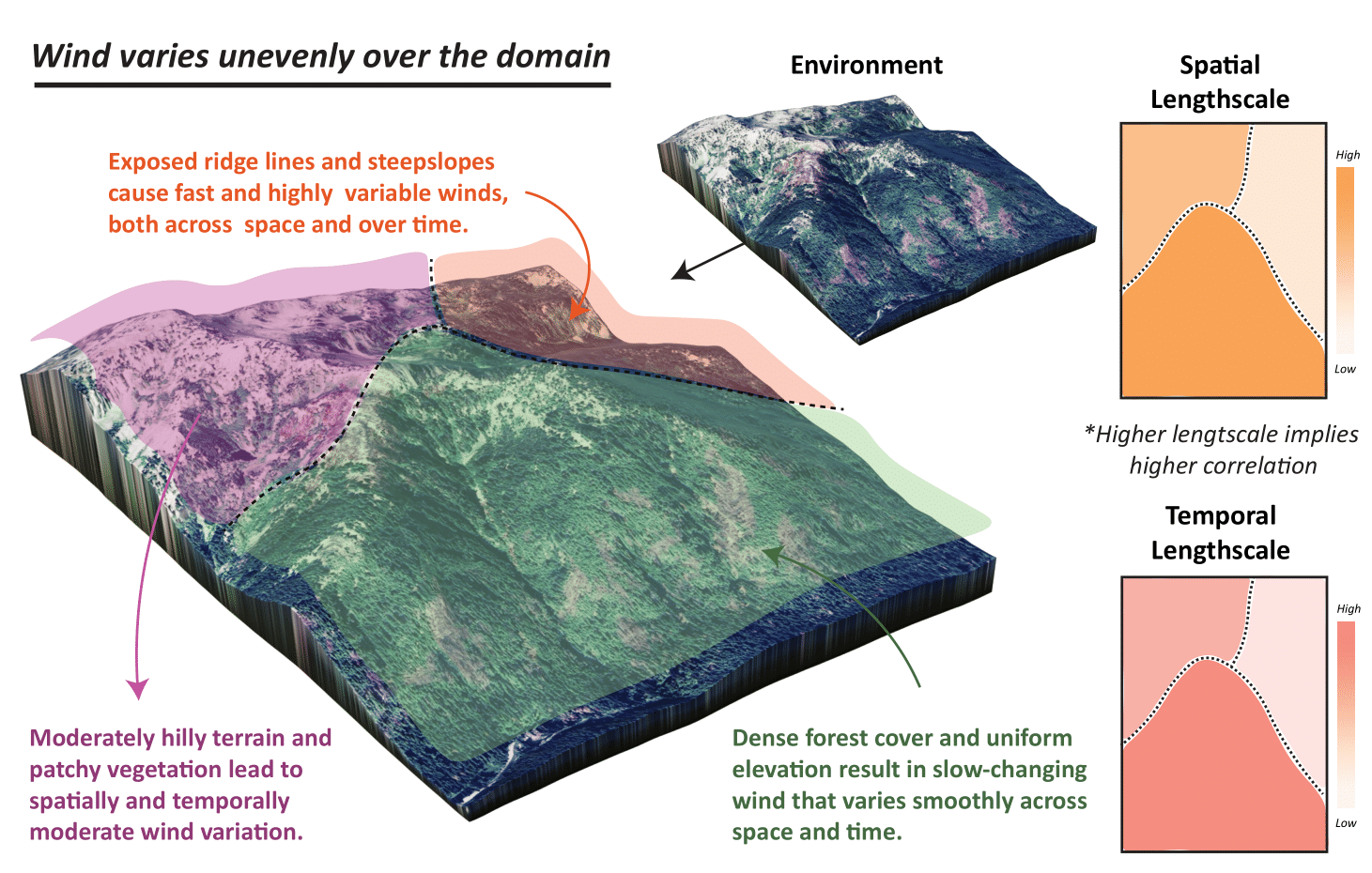
Multi-Robot Allocation for Information Gathering in Non-Uniform Spatiotemporal Environments
Kaleb Ben Naveed
Haejoon Lee
Dimitra Panagou
IEEE ACC 2026
pdf
/
arxiv
/
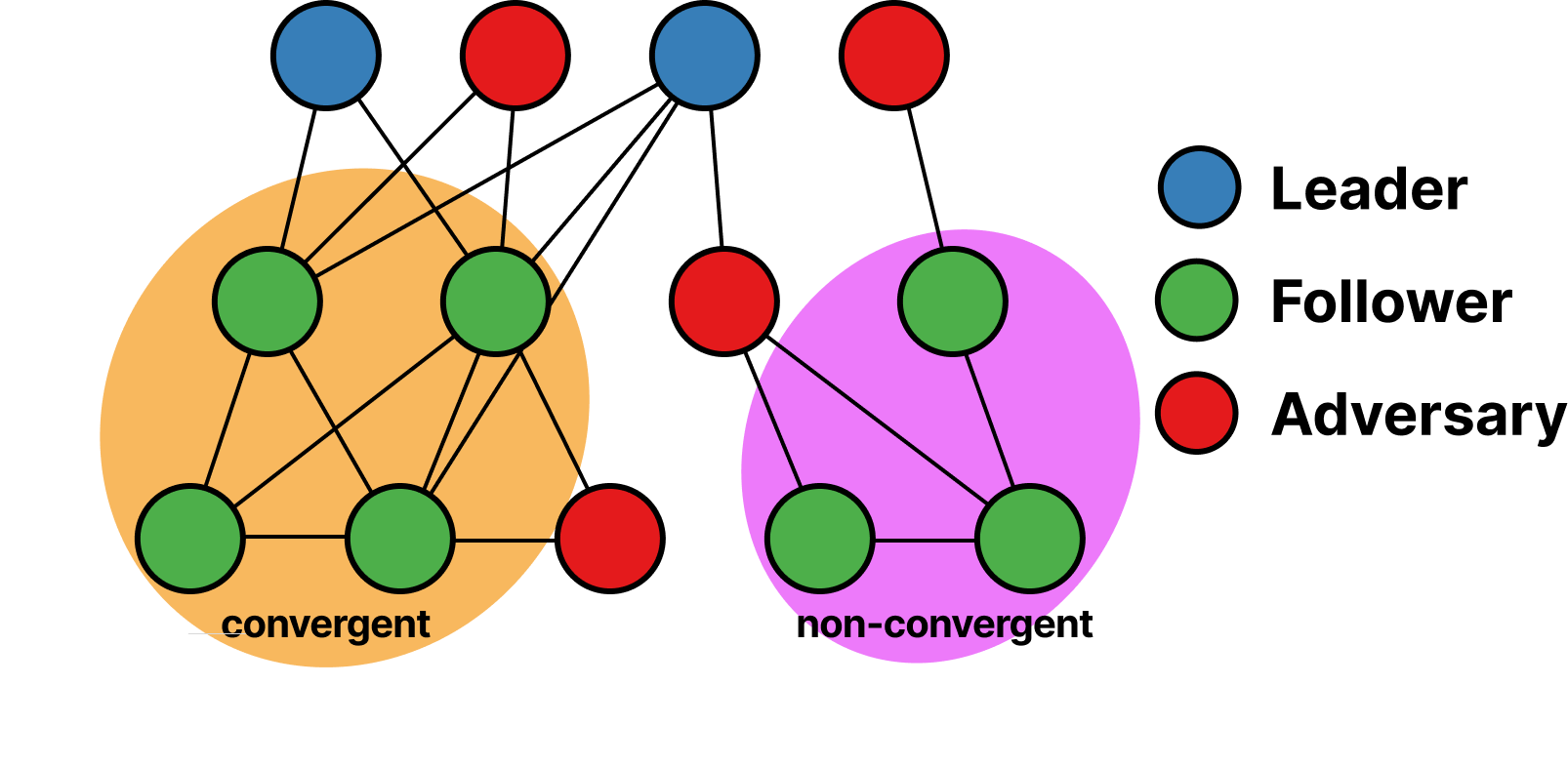
Partial Resilient Leader-Follower Consensus in Time-Varying Graphs
Haejoon Lee
Dimitra Panagou
IEEE ACC 2026
pdf
/
code
/
arxiv
/
Distributed Resilience-Aware Control in Multi-Robot Networks
Haejoon Lee
Dimitra Panagou
IEEE CDC 2025
pdf
/
code
/
arxiv
/
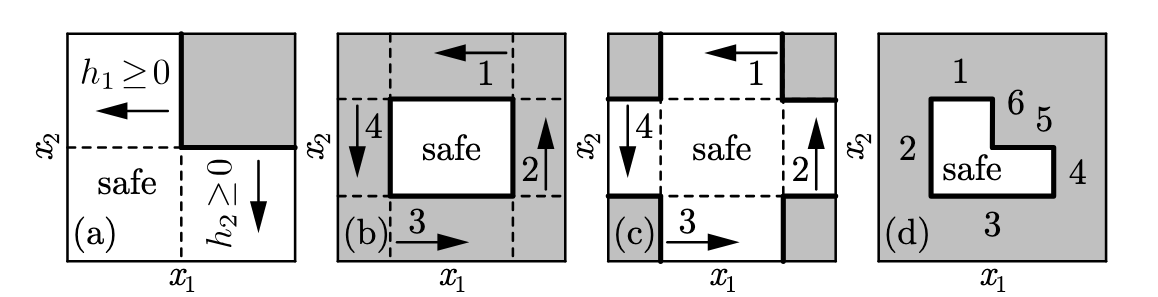
Combinatorial Control Barrier Functions: Nested Boolean and p-Choose-r Compositions of Safety Constraints
Pio Ong
Haejoon Lee
Tamas G. Molnar
Dimitra Panagou
Aaron D. Ames
IEEE L-CSS 2025
link
/
Reformulations of Quadratic Programs for Lipschitz Continuity
Devansh Agrawal*
Haejoon Lee*
Dimitra Panagou
IEEE L-CSS 2025
pdf
/
code
/
arxiv
/
Maintaining Strong r-Robustness in Reconfigurable Multi-Robot Networks using Control Barrier Functions
Haejoon Lee
Dimitra Panagou
IEEE ICRA 2025
pdf
/
video
/
code
/
arxiv
/
Construction of the Sparsest Maximally r-Robust Graphs
Haejoon Lee
Dimitra Panagou
IEEE CDC 2024
pdf
/
link
/
arxiv
/