Dimitra Panagou

Papers


Adaptive Ergodic Search with Energy-Aware Scheduling for Persistent Multi-Robot Missions
Autonomous Robots, Springer Nature
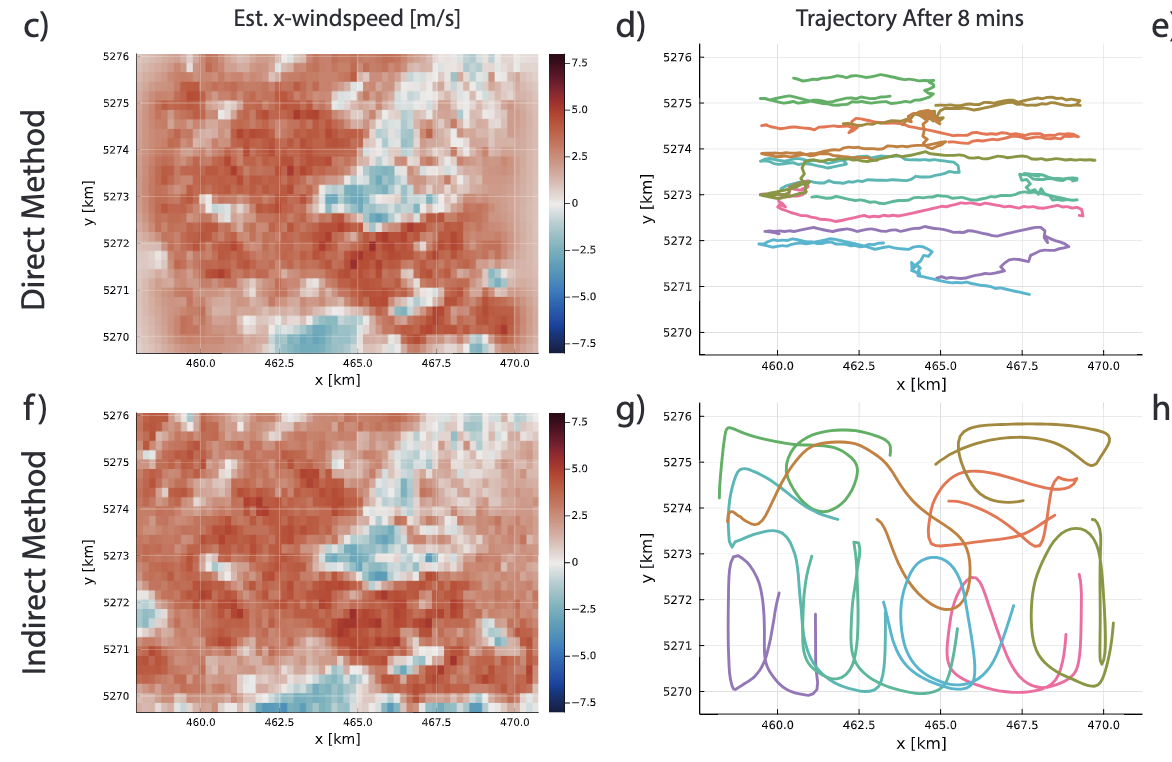
Fusion of Indirect Methods and Iterative Learning for Persistent Velocity Trajectory Optimization of a Sustainably Powered Autonomous Surface Vessel
IEEE Conference on Control Technology and Applications (CCTA) 2025
meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence
IEEE/RSJ IROS 2025
Conformal Prediction in the Loop: Risk-Aware Control Barrier Functions for Stochastic Systems with Data-Driven State Estimators
IEEE Control Systems Letters 2025
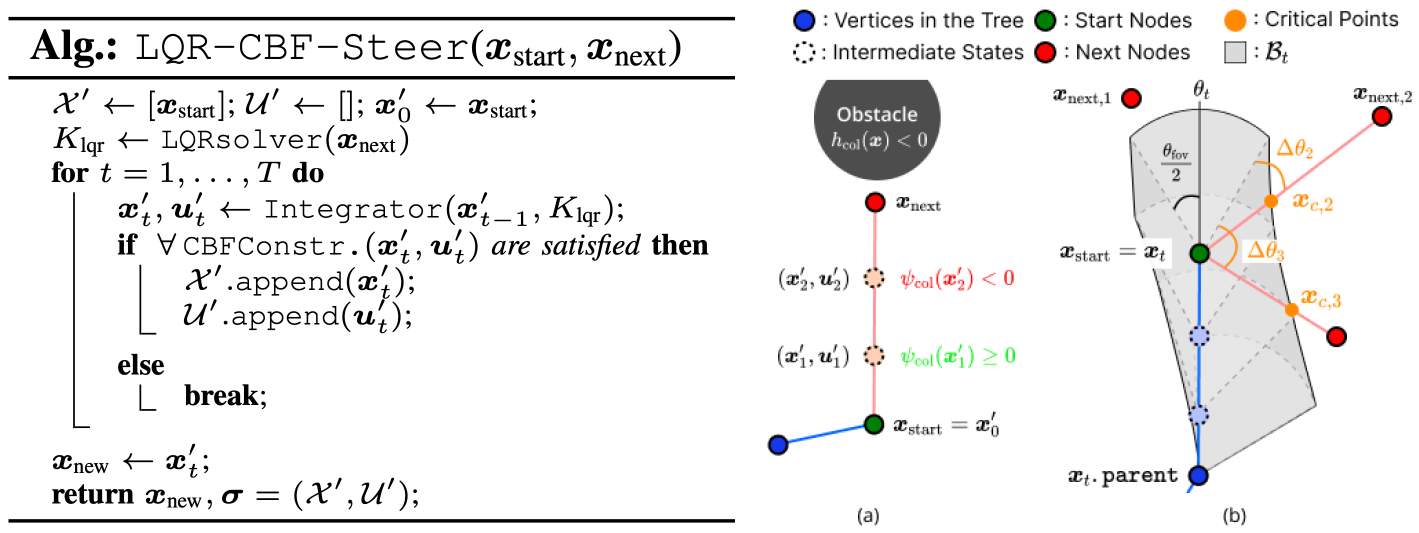
Visibility-Aware RRT* for Safety-Critical Navigation of Perception-Limited Robots in Unknown Environments
IEEE Robotics and Automation Letter 2025
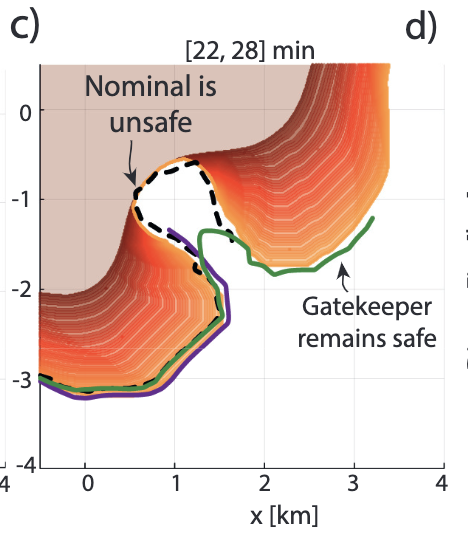
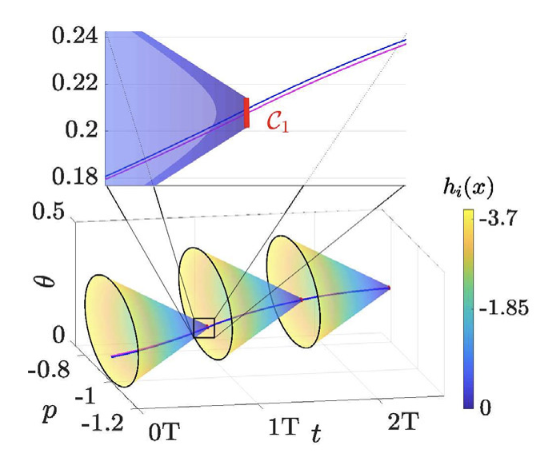
gatekeeper: Online Safety Verification and Control for Nonlinear Systems in Dynamic Environments
IEEE T-RO 2024
@inproceedings{agrawal2024gatekeeper,
title={gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments},
author={Agrawal, Devansh and Chen, Ruichang and Panagou, Dimitra},
booktitle={{IEEE Transactions on Robotics},
year={2024},
volume={40},
number={},
pages={4358-4375},
organization={IEEE}
}
Eclares: Energy-Aware Clarity-Driven Ergodic Search
IEEE ICRA 2024
@inproceedings{naveed2024eclares,
title={Eclares: Energy-aware clarity-driven ergodic search},
author={Naveed, Kaleb Ben and Agrawal, Devansh and Vermillion, Christopher and Panagou, Dimitra},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={14326--14332},
year={2024},
organization={IEEE}
}
Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems
Annual Reviews in Control 2024
@article{garg2024advances,
title={Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems},
author={Garg, Kunal and Usevitch, James and Breeden, Joseph and Black, Mitchell and Agrawal, Devansh and Parwana, Hardik and Panagou, Dimitra},
journal={Annual Reviews in Control},
volume={57},
pages={100945},
year={2024},
publisher={Elsevier}
}
Algorithms for Finding Compatible Constraints in Receding-Horizon Control of Dynamical Systems.
ACC 2024
@inproceedings{DBLP:conf/amcc/ParwanaWP24,
author = {Hardik Parwana and
Ruiyang Wang and
Dimitra Panagou},
title = {Algorithms for Finding Compatible Constraints in Receding-Horizon
Control of Dynamical Systems},
booktitle = {American Control Conference, {ACC} 2024, Toronto, ON, Canada, July
10-12, 2024},
pages = {2074--2081},
publisher = {{IEEE}},
year = {2024},
url = {https://doi.org/10.23919/ACC60939.2024.10644243},
doi = {10.23919/ACC60939.2024.10644243},
timestamp = {Sat, 21 Sep 2024 12:19:37 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ParwanaWP24.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Formally verified asymptotic consensus in robust networks.
Tools and Algorithms for the Construction and Analysis of Systems 2024
@inproceedings{DBLP:conf/tacas/TekriwalTJKP24,
author = {Mohit Tekriwal and
Avi Tachna{-}Frame and
Jean{-}Baptiste Jeannin and
Manos Kapritsos and
Dimitra Panagou},
editor = {Bernd Finkbeiner and
Laura Kov{\'{a}}cs},
title = {Formally verified asymptotic consensus in robust networks},
booktitle = {Tools and Algorithms for the Construction and Analysis of Systems
- 30th International Conference, {TACAS} 2024, Held as Part of the
European Joint Conferences on Theory and Practice of Software, {ETAPS}
2024, Luxembourg City, Luxembourg, April 6-11, 2024, Proceedings,
Part {I}},
series = {Lecture Notes in Computer Science},
volume = {14570},
pages = {248--267},
publisher = {Springer},
year = {2024},
url = {https://doi.org/10.1007/978-3-031-57246-3\_14},
doi = {10.1007/978-3-031-57246-3\_14},
timestamp = {Sun, 06 Oct 2024 21:15:24 +0200},
biburl = {https://dblp.org/rec/conf/tacas/TekriwalTJKP24.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Risk-Aware Fixed-Time Stabilization of Stochastic Systems Under Measurement Uncertainty
ACC 2024
@inproceedings{DBLP:conf/amcc/BlackFHP24,
author = {Mitchell Black and
Georgios Fainekos and
Bardh Hoxha and
Dimitra Panagou},
title = {Risk-Aware Fixed-Time Stabilization of Stochastic Systems Under Measurement
Uncertainty},
booktitle = {American Control Conference, {ACC} 2024, Toronto, ON, Canada, July
10-12, 2024},
pages = {3276--3283},
publisher = {{IEEE}},
year = {2024},
url = {https://doi.org/10.23919/ACC60939.2024.10644792},
doi = {10.23919/ACC60939.2024.10644792},
timestamp = {Sat, 21 Sep 2024 12:19:37 +0200},
biburl = {https://dblp.org/rec/conf/amcc/BlackFHP24.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Safety-Critical Control for Systems With Sporadic Measurements and Dwell-Time Constraints
IEEE Control Systems Letteter 2024
@article{DBLP:journals/csysl/BreedenZP24,
author = {Joseph Breeden and
Luca Zaccarian and
Dimitra Panagou},
title = {Robust Safety-Critical Control for Systems With Sporadic Measurements
and Dwell-Time Constraints},
journal = {{IEEE} Control. Syst. Lett.},
volume = {8},
pages = {1415--1420},
year = {2024},
url = {https://doi.org/10.1109/LCSYS.2024.3410631},
doi = {10.1109/LCSYS.2024.3410631},
timestamp = {Fri, 19 Jul 2024 23:16:25 +0200},
biburl = {https://dblp.org/rec/journals/csysl/BreedenZP24.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments
IEEE IROS 2023
@inproceedings{agrawal2023gatekeeper,
title={gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments},
author={Agrawal, Devansh and Chen, Ruichang and Panagou, Dimitra},
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={259--266},
year={2023},
organization={IEEE}
}
Sensor-based Planning and Control for Robotic Systems: Introducing Clarity and Perceivability
IEEE L-CSS and CDC 2023
@article{agrawal2023sensor,
title={Sensor-based planning and control for robotic systems: Introducing clarity and perceivability},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
year={2023},
publisher={IEEE}
}Adaptation for Validation of Consolidated Control Barrier Functions.
CDC
@inproceedings{DBLP:conf/cdc/BlackP23,
author = {Mitchell Black and
Dimitra Panagou},
title = {Adaptation for Validation of Consolidated Control Barrier Functions},
booktitle = {62nd {IEEE} Conference on Decision and Control, {CDC} 2023, Singapore,
December 13-15, 2023},
pages = {751--757},
publisher = {{IEEE}},
year = {2023},
url = {https://doi.org/10.1109/CDC49753.2023.10383597},
doi = {10.1109/CDC49753.2023.10383597},
timestamp = {Mon, 29 Jan 2024 17:31:54 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BlackP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Adversarial Resilience for Sampled-Data Systems Under High-Relative-Degree Safety Constraints.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/UsevitchP23,
author = {James Usevitch and
Dimitra Panagou},
title = {Adversarial Resilience for Sampled-Data Systems Under High-Relative-Degree
Safety Constraints},
journal = {{IEEE} Trans. Autom. Control.},
volume = {68},
number = {3},
pages = {1537--1552},
year = {2023},
url = {https://doi.org/10.1109/TAC.2022.3157791},
doi = {10.1109/TAC.2022.3157791},
timestamp = {Sat, 11 Mar 2023 00:13:06 +0100},
biburl = {https://dblp.org/rec/journals/tac/UsevitchP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Adversary Detection and Resilient Control for Multiagent Systems.
IEEE Trans. Control. Netw. Syst.
@article{DBLP:journals/tcns/MustafaP23,
author = {Aquib Mustafa and
Dimitra Panagou},
title = {Adversary Detection and Resilient Control for Multiagent Systems},
journal = {{IEEE} Trans. Control. Netw. Syst.},
volume = {10},
number = {1},
pages = {355--367},
year = {2023},
url = {https://doi.org/10.1109/TCNS.2022.3203350},
doi = {10.1109/TCNS.2022.3203350},
timestamp = {Tue, 28 Mar 2023 19:51:22 +0200},
biburl = {https://dblp.org/rec/journals/tcns/MustafaP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Aerial Swarm Defense Using Interception and Herding Strategies.
IEEE Trans. Robotics
@article{DBLP:journals/trob/ChipadeP23,
author = {Vishnu S. Chipade and
Dimitra Panagou},
title = {Aerial Swarm Defense Using Interception and Herding Strategies},
journal = {{IEEE} Trans. Robotics},
volume = {39},
number = {5},
pages = {3821--3837},
year = {2023},
url = {https://doi.org/10.1109/TRO.2023.3292514},
doi = {10.1109/TRO.2023.3292514},
timestamp = {Sat, 14 Oct 2023 20:13:20 +0200},
biburl = {https://dblp.org/rec/journals/trob/ChipadeP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Collaborative Control of Aerial Robots for Inferring Human Intent from Gaze Following.
CCTA
@inproceedings{DBLP:conf/ccta/ChipadeGHP23,
author = {Vishnu S. Chipade and
Alia Gilbert and
Daniel Harari and
Dimitra Panagou},
title = {Collaborative Control of Aerial Robots for Inferring Human Intent
from Gaze Following},
booktitle = {{IEEE} Conference on Control Technology and Applications, {CCTA} 2023,
Bridgetown, Barbados, August 16-18, 2023},
pages = {255--262},
publisher = {{IEEE}},
year = {2023},
url = {https://doi.org/10.1109/CCTA54093.2023.10252647},
doi = {10.1109/CCTA54093.2023.10252647},
timestamp = {Thu, 28 Sep 2023 09:28:41 +0200},
biburl = {https://dblp.org/rec/conf/ccta/ChipadeGHP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Compositions of Multiple Control Barrier Functions Under Input Constraints.
ACC
@inproceedings{DBLP:conf/amcc/BreedenP23,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Compositions of Multiple Control Barrier Functions Under Input Constraints},
booktitle = {American Control Conference, {ACC} 2023, San Diego, CA, USA, May 31
- June 2, 2023},
pages = {3688--3695},
publisher = {{IEEE}},
year = {2023},
url = {https://doi.org/10.23919/ACC55779.2023.10156625},
doi = {10.23919/ACC55779.2023.10156625},
timestamp = {Tue, 11 Jul 2023 16:44:32 +0200},
biburl = {https://dblp.org/rec/conf/amcc/BreedenP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Future-Focused Control Barrier Functions for Autonomous Vehicle Control.
ACC
@inproceedings{DBLP:conf/amcc/BlackJSP23,
author = {Mitchell Black and
Mrdjan Jankovic and
Abhishek Sharma and
Dimitra Panagou},
title = {Future-Focused Control Barrier Functions for Autonomous Vehicle Control},
booktitle = {American Control Conference, {ACC} 2023, San Diego, CA, USA, May 31
- June 2, 2023},
pages = {3324--3331},
publisher = {{IEEE}},
year = {2023},
url = {https://doi.org/10.23919/ACC55779.2023.10156163},
doi = {10.23919/ACC55779.2023.10156163},
timestamp = {Tue, 11 Jul 2023 16:44:32 +0200},
biburl = {https://dblp.org/rec/conf/amcc/BlackJSP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Control Barrier Functions under high relative degree and input constraints for satellite trajectories.
Autom.
@article{DBLP:journals/automatica/BreedenP23,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Robust Control Barrier Functions under high relative degree and input
constraints for satellite trajectories},
journal = {Autom.},
volume = {155},
pages = {111109},
year = {2023},
url = {https://doi.org/10.1016/j.automatica.2023.111109},
doi = {10.1016/J.AUTOMATICA.2023.111109},
timestamp = {Wed, 16 Aug 2023 16:57:32 +0200},
biburl = {https://dblp.org/rec/journals/automatica/BreedenP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Safety Under Uncertainty: Tight Bounds with Risk-Aware Control Barrier Functions.
ICRA
@inproceedings{DBLP:conf/icra/BlackFHPP23,
author = {Mitchell Black and
Georgios Fainekos and
Bardh Hoxha and
Danil V. Prokhorov and
Dimitra Panagou},
title = {Safety Under Uncertainty: Tight Bounds with Risk-Aware Control Barrier
Functions},
booktitle = {{IEEE} International Conference on Robotics and Automation, {ICRA}
2023, London, UK, May 29 - June 2, 2023},
pages = {12686--12692},
publisher = {{IEEE}},
year = {2023},
url = {https://doi.org/10.1109/ICRA48891.2023.10161379},
doi = {10.1109/ICRA48891.2023.10161379},
timestamp = {Sun, 06 Oct 2024 21:06:22 +0200},
biburl = {https://dblp.org/rec/conf/icra/BlackFHPP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Safety-Critical Control for Systems With Impulsive Actuators and Dwell Time Constraints.
IEEE Control. Syst. Lett.
@article{DBLP:journals/csysl/BreedenP23,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Safety-Critical Control for Systems With Impulsive Actuators and Dwell
Time Constraints},
journal = {{IEEE} Control. Syst. Lett.},
volume = {7},
pages = {2119--2124},
year = {2023},
url = {https://doi.org/10.1109/LCSYS.2023.3285141},
doi = {10.1109/LCSYS.2023.3285141},
timestamp = {Fri, 07 Jul 2023 23:32:29 +0200},
biburl = {https://dblp.org/rec/journals/csysl/BreedenP23.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
IEEE L-CSS and ACC 2022
@ARTICLE{9655322,
author={Agrawal, Devansh R. and Parwana, Hardik and Cosner, Ryan K. and Rosolia, Ugo and Ames, Aaron D. and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
title={A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems},
year={2022},
volume={6},
number={},
pages={2138-2143},
doi={10.1109/LCSYS.2021.3136465}
}
Safe and robust observer-controller synthesis using control barrier functions
IEEE L-CSS and CDC 2022
@article{agrawal2022safe,
title={Safe and robust observer-controller synthesis using control barrier functions},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
volume={7},
pages={127--132},
year={2022},
publisher={IEEE}
}Adaptive Control of Second-Order Safety-Critical Multiagent Systems With Nonlinear Dynamics.
IEEE Trans. Control. Netw. Syst.
@article{DBLP:journals/tcns/ArabiP22,
author = {Ehsan Arabi and
Dimitra Panagou},
title = {Adaptive Control of Second-Order Safety-Critical Multiagent Systems
With Nonlinear Dynamics},
journal = {{IEEE} Trans. Control. Netw. Syst.},
volume = {9},
number = {4},
pages = {1911--1922},
year = {2022},
url = {https://doi.org/10.1109/TCNS.2022.3181547},
doi = {10.1109/TCNS.2022.3181547},
timestamp = {Sun, 15 Jan 2023 18:31:15 +0100},
biburl = {https://dblp.org/rec/journals/tcns/ArabiP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Control Barrier Functions in Sampled-Data Systems.
IEEE Control. Syst. Lett.
@article{DBLP:journals/csysl/BreedenGP22,
author = {Joseph Breeden and
Kunal Garg and
Dimitra Panagou},
title = {Control Barrier Functions in Sampled-Data Systems},
journal = {{IEEE} Control. Syst. Lett.},
volume = {6},
pages = {367--372},
year = {2022},
url = {https://doi.org/10.1109/LCSYS.2021.3076127},
doi = {10.1109/LCSYS.2021.3076127},
timestamp = {Tue, 13 Jul 2021 13:26:13 +0200},
biburl = {https://dblp.org/rec/journals/csysl/BreedenGP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Expanding human visual field: online learning of assistive camera views by an aerial co-robot.
Auton. Robots
@article{DBLP:journals/arobots/BentzQP22,
author = {William Bentz and
Long Qian and
Dimitra Panagou},
title = {Expanding human visual field: online learning of assistive camera
views by an aerial co-robot},
journal = {Auton. Robots},
volume = {46},
number = {8},
pages = {949--970},
year = {2022},
url = {https://doi.org/10.1007/s10514-022-10059-4},
doi = {10.1007/S10514-022-10059-4},
timestamp = {Sun, 13 Nov 2022 17:53:19 +0100},
biburl = {https://dblp.org/rec/journals/arobots/BentzQP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Fixed-time control under spatiotemporal and input constraints: A Quadratic Programming based approach.
Autom.
@article{DBLP:journals/automatica/GargAP22,
author = {Kunal Garg and
Ehsan Arabi and
Dimitra Panagou},
title = {Fixed-time control under spatiotemporal and input constraints: {A}
Quadratic Programming based approach},
journal = {Autom.},
volume = {141},
pages = {110314},
year = {2022},
url = {https://doi.org/10.1016/j.automatica.2022.110314},
doi = {10.1016/J.AUTOMATICA.2022.110314},
timestamp = {Wed, 07 Dec 2022 23:03:25 +0100},
biburl = {https://dblp.org/rec/journals/automatica/GargAP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Guaranteed Safe Spacecraft Docking With Control Barrier Functions.
IEEE Control. Syst. Lett.
@article{DBLP:journals/csysl/BreedenP22,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Guaranteed Safe Spacecraft Docking With Control Barrier Functions},
journal = {{IEEE} Control. Syst. Lett.},
volume = {6},
pages = {2000--2005},
year = {2022},
url = {https://doi.org/10.1109/LCSYS.2021.3136813},
doi = {10.1109/LCSYS.2021.3136813},
timestamp = {Sat, 08 Jan 2022 02:23:17 +0100},
biburl = {https://dblp.org/rec/journals/csysl/BreedenP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multi-Rate Control Design Under Input Constraints via Fixed-Time Barrier Functions.
IEEE Control. Syst. Lett.
@article{DBLP:journals/csysl/GargCRAP22,
author = {Kunal Garg and
Ryan K. Cosner and
Ugo Rosolia and
Aaron D. Ames and
Dimitra Panagou},
title = {Multi-Rate Control Design Under Input Constraints via Fixed-Time Barrier
Functions},
journal = {{IEEE} Control. Syst. Lett.},
volume = {6},
pages = {608--613},
year = {2022},
url = {https://doi.org/10.1109/LCSYS.2021.3084322},
doi = {10.1109/LCSYS.2021.3084322},
timestamp = {Thu, 16 Sep 2021 18:02:01 +0200},
biburl = {https://dblp.org/rec/journals/csysl/GargCRAP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Predictive Control Barrier Functions for Online Safety Critical Control.
CDC
@inproceedings{DBLP:conf/cdc/BreedenP22,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Predictive Control Barrier Functions for Online Safety Critical Control},
booktitle = {61st {IEEE} Conference on Decision and Control, {CDC} 2022, Cancun,
Mexico, December 6-9, 2022},
pages = {924--931},
publisher = {{IEEE}},
year = {2022},
url = {https://doi.org/10.1109/CDC51059.2022.9992926},
doi = {10.1109/CDC51059.2022.9992926},
timestamp = {Wed, 18 Jan 2023 15:37:50 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BreedenP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Recursive Feasibility Guided Optimal Parameter Adaptation of Differential Convex Optimization Policies for Safety-Critical Systems.
ICRA
@inproceedings{DBLP:conf/icra/ParwanaP22,
author = {Hardik Parwana and
Dimitra Panagou},
title = {Recursive Feasibility Guided Optimal Parameter Adaptation of Differential
Convex Optimization Policies for Safety-Critical Systems},
booktitle = {2022 International Conference on Robotics and Automation, {ICRA} 2022,
Philadelphia, PA, USA, May 23-27, 2022},
pages = {6807--6813},
publisher = {{IEEE}},
year = {2022},
url = {https://doi.org/10.1109/ICRA46639.2022.9812398},
doi = {10.1109/ICRA46639.2022.9812398},
timestamp = {Wed, 20 Jul 2022 18:22:50 +0200},
biburl = {https://dblp.org/rec/conf/icra/ParwanaP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Resilient Trajectory Propagation in Multirobot Networks.
IEEE Trans. Robotics
@article{DBLP:journals/trob/UsevitchP22,
author = {James Usevitch and
Dimitra Panagou},
title = {Resilient Trajectory Propagation in Multirobot Networks},
journal = {{IEEE} Trans. Robotics},
volume = {38},
number = {1},
pages = {42--56},
year = {2022},
url = {https://doi.org/10.1109/TRO.2021.3127076},
doi = {10.1109/TRO.2021.3127076},
timestamp = {Wed, 23 Feb 2022 11:15:29 +0100},
biburl = {https://dblp.org/rec/journals/trob/UsevitchP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Leader-Follower Formation Control for Human-Robot Scenarios.
ACC
@inproceedings{DBLP:conf/amcc/GilbertCP22,
author = {Alia Gilbert and
Vishnu S. Chipade and
Dimitra Panagou},
title = {Robust Leader-Follower Formation Control for Human-Robot Scenarios},
booktitle = {American Control Conference, {ACC} 2022, Atlanta, GA, USA, June 8-10,
2022},
pages = {641--646},
publisher = {{IEEE}},
year = {2022},
url = {https://doi.org/10.23919/ACC53348.2022.9867709},
doi = {10.23919/ACC53348.2022.9867709},
timestamp = {Mon, 06 Nov 2023 12:57:51 +0100},
biburl = {https://dblp.org/rec/conf/amcc/GilbertCP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Trust-based Rate-Tunable Control Barrier Functions for Non-Cooperative Multi-Agent Systems.
CDC
@inproceedings{DBLP:conf/cdc/ParwanaMP22,
author = {Hardik Parwana and
Aquib Mustafa and
Dimitra Panagou},
title = {Trust-based Rate-Tunable Control Barrier Functions for Non-Cooperative
Multi-Agent Systems},
booktitle = {61st {IEEE} Conference on Decision and Control, {CDC} 2022, Cancun,
Mexico, December 6-9, 2022},
pages = {2222--2229},
publisher = {{IEEE}},
year = {2022},
url = {https://doi.org/10.1109/CDC51059.2022.9992744},
doi = {10.1109/CDC51059.2022.9992744},
timestamp = {Wed, 18 Jan 2023 15:37:50 +0100},
biburl = {https://dblp.org/rec/conf/cdc/ParwanaMP22.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
Safe Control Synthesis via Input Constrained Control Barrier Functions
IEEE CDC 2021
@INPROCEEDINGS{9682938,
author={Agrawal, Devansh R. and Panagou, Dimitra},
booktitle={2021 60th IEEE Conference on Decision and Control (CDC)},
title={Safe Control Synthesis via Input Constrained Control Barrier Functions},
year={2021},
volume={},
number={},
pages={6113-6118},
doi={10.1109/CDC45484.2021.9682938}
}A Fixed-Time Stable Adaptation Law for Safety-Critical Control under Parametric Uncertainty.
ECC
@inproceedings{DBLP:conf/eucc/BlackAP21,
author = {Mitchell Black and
Ehsan Arabi and
Dimitra Panagou},
title = {A Fixed-Time Stable Adaptation Law for Safety-Critical Control under
Parametric Uncertainty},
booktitle = {2021 European Control Conference, {ECC} 2021, Virtual Event / Delft,
The Netherlands, June 29 - July 2, 2021},
pages = {1328--1333},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ECC54610.2021.9655080},
doi = {10.23919/ECC54610.2021.9655080},
timestamp = {Thu, 31 Mar 2022 11:10:43 +0200},
biburl = {https://dblp.org/rec/conf/eucc/BlackAP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Adaptive Active-Passive Networked Multiagent Systems.
ACC
@inproceedings{DBLP:conf/amcc/ArabiPY21,
author = {Ehsan Arabi and
Dimitra Panagou and
Tansel Yucelen},
title = {Adaptive Active-Passive Networked Multiagent Systems},
booktitle = {2021 American Control Conference, {ACC} 2021, New Orleans, LA, USA,
May 25-28, 2021},
pages = {1113--1118},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ACC50511.2021.9483258},
doi = {10.23919/ACC50511.2021.9483258},
timestamp = {Fri, 30 Jul 2021 11:11:53 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ArabiPY21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Adversarial Resilience for Sampled-Data Systems using Control Barrier Function Methods.
ACC
@inproceedings{DBLP:conf/amcc/UsevitchP21,
author = {James Usevitch and
Dimitra Panagou},
title = {Adversarial Resilience for Sampled-Data Systems using Control Barrier
Function Methods},
booktitle = {2021 American Control Conference, {ACC} 2021, New Orleans, LA, USA,
May 25-28, 2021},
pages = {758--763},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ACC50511.2021.9482659},
doi = {10.23919/ACC50511.2021.9482659},
timestamp = {Fri, 30 Jul 2021 11:11:53 +0200},
biburl = {https://dblp.org/rec/conf/amcc/UsevitchP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Aerial Swarm Defense by StringNet Herding: Theory and Experiments.
Frontiers Robotics AI
@article{DBLP:journals/firai/ChipadeMP21,
author = {Vishnu S. Chipade and
Venkata Sai Aditya Marella and
Dimitra Panagou},
title = {Aerial Swarm Defense by StringNet Herding: Theory and Experiments},
journal = {Frontiers Robotics {AI}},
volume = {8},
pages = {640446},
year = {2021},
url = {https://doi.org/10.3389/frobt.2021.640446},
doi = {10.3389/FROBT.2021.640446},
timestamp = {Tue, 04 May 2021 17:49:02 +0200},
biburl = {https://dblp.org/rec/journals/firai/ChipadeMP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Characterization of Domain of Fixed-time Stability under Control Input Constraints.
ACC
@inproceedings{DBLP:conf/amcc/GargP21,
author = {Kunal Garg and
Dimitra Panagou},
title = {Characterization of Domain of Fixed-time Stability under Control Input
Constraints},
booktitle = {2021 American Control Conference, {ACC} 2021, New Orleans, LA, USA,
May 25-28, 2021},
pages = {2272--2277},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ACC50511.2021.9482780},
doi = {10.23919/ACC50511.2021.9482780},
timestamp = {Thu, 14 Oct 2021 10:23:17 +0200},
biburl = {https://dblp.org/rec/conf/amcc/GargP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Dynamic Coverage Meets Regret: Unifying Two Control Performance Measures for Mobile Agents in Spatiotemporally Varying Environments.
CDC
@inproceedings{DBLP:conf/cdc/HaydonMKPCMV21,
author = {Ben Haydon and
Kirti D. Mishra and
Patrick Keyantuo and
Dimitra Panagou and
Fotini K. Chow and
Scott J. Moura and
Chris Vermillion},
title = {Dynamic Coverage Meets Regret: Unifying Two Control Performance Measures
for Mobile Agents in Spatiotemporally Varying Environments},
booktitle = {2021 60th {IEEE} Conference on Decision and Control (CDC), Austin,
TX, USA, December 14-17, 2021},
pages = {521--526},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.1109/CDC45484.2021.9682826},
doi = {10.1109/CDC45484.2021.9682826},
timestamp = {Tue, 17 May 2022 15:53:17 +0200},
biburl = {https://dblp.org/rec/conf/cdc/HaydonMKPCMV21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Finite-Time Stabilization of Switched Systems with Unstable Modes.
CDC
@inproceedings{DBLP:conf/cdc/GargP21,
author = {Kunal Garg and
Dimitra Panagou},
title = {Finite-Time Stabilization of Switched Systems with Unstable Modes},
booktitle = {2021 60th {IEEE} Conference on Decision and Control (CDC), Austin,
TX, USA, December 14-17, 2021},
pages = {3924--3929},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.1109/CDC45484.2021.9683332},
doi = {10.1109/CDC45484.2021.9683332},
timestamp = {Wed, 07 Dec 2022 23:07:58 +0100},
biburl = {https://dblp.org/rec/conf/cdc/GargP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Fixed-Time Stable Gradient Flows: Applications to Continuous-Time Optimization.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/GargP21,
author = {Kunal Garg and
Dimitra Panagou},
title = {Fixed-Time Stable Gradient Flows: Applications to Continuous-Time
Optimization},
journal = {{IEEE} Trans. Autom. Control.},
volume = {66},
number = {5},
pages = {2002--2015},
year = {2021},
url = {https://doi.org/10.1109/TAC.2020.3001436},
doi = {10.1109/TAC.2020.3001436},
timestamp = {Sun, 25 Jul 2021 11:40:11 +0200},
biburl = {https://dblp.org/rec/journals/tac/GargP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Herding an Adversarial Swarm in Three-dimensional Spaces.
ACC
@inproceedings{DBLP:conf/amcc/ZhangCP21,
author = {Weifan Zhang and
Vishnu S. Chipade and
Dimitra Panagou},
title = {Herding an Adversarial Swarm in Three-dimensional Spaces},
booktitle = {2021 American Control Conference, {ACC} 2021, New Orleans, LA, USA,
May 25-28, 2021},
pages = {4722--4728},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ACC50511.2021.9482990},
doi = {10.23919/ACC50511.2021.9482990},
timestamp = {Fri, 30 Jul 2021 11:11:53 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ZhangCP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}High Relative Degree Control Barrier Functions Under Input Constraints.
CDC
@inproceedings{DBLP:conf/cdc/BreedenP21,
author = {Joseph Breeden and
Dimitra Panagou},
title = {High Relative Degree Control Barrier Functions Under Input Constraints},
booktitle = {2021 60th {IEEE} Conference on Decision and Control (CDC), Austin,
TX, USA, December 14-17, 2021},
pages = {6119--6124},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.1109/CDC45484.2021.9683705},
doi = {10.1109/CDC45484.2021.9683705},
timestamp = {Tue, 17 May 2022 15:53:17 +0200},
biburl = {https://dblp.org/rec/conf/cdc/BreedenP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multiagent Planning and Control for Swarm Herding in 2-D Obstacle Environments Under Bounded Inputs.
IEEE Trans. Robotics
@article{DBLP:journals/trob/ChipadeP21,
author = {Vishnu S. Chipade and
Dimitra Panagou},
title = {Multiagent Planning and Control for Swarm Herding in 2-D Obstacle
Environments Under Bounded Inputs},
journal = {{IEEE} Trans. Robotics},
volume = {37},
number = {6},
pages = {1956--1972},
year = {2021},
url = {https://doi.org/10.1109/TRO.2021.3072026},
doi = {10.1109/TRO.2021.3072026},
timestamp = {Wed, 15 Dec 2021 10:26:10 +0100},
biburl = {https://dblp.org/rec/journals/trob/ChipadeP21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Control Barrier and Control Lyapunov Functions with Fixed-Time Convergence Guarantees.
ACC
@inproceedings{DBLP:conf/amcc/GargP21a,
author = {Kunal Garg and
Dimitra Panagou},
title = {Robust Control Barrier and Control Lyapunov Functions with Fixed-Time
Convergence Guarantees},
booktitle = {2021 American Control Conference, {ACC} 2021, New Orleans, LA, USA,
May 25-28, 2021},
pages = {2292--2297},
publisher = {{IEEE}},
year = {2021},
url = {https://doi.org/10.23919/ACC50511.2021.9482751},
doi = {10.23919/ACC50511.2021.9482751},
timestamp = {Thu, 14 Oct 2021 10:23:01 +0200},
biburl = {https://dblp.org/rec/conf/amcc/GargP21a.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Distributed Fixed-Time Economic Dispatch Under Time-Varying Topology.
IEEE Control. Syst. Lett.
@article{DBLP:journals/csysl/BaranwalGPH21,
author = {Mayank Baranwal and
Kunal Garg and
Dimitra Panagou and
Alfred O. Hero III},
title = {Robust Distributed Fixed-Time Economic Dispatch Under Time-Varying
Topology},
journal = {{IEEE} Control. Syst. Lett.},
volume = {5},
number = {4},
pages = {1183--1188},
year = {2021},
url = {https://doi.org/10.1109/LCSYS.2020.3020248},
doi = {10.1109/LCSYS.2020.3020248},
timestamp = {Thu, 16 Sep 2021 18:01:58 +0200},
biburl = {https://dblp.org/rec/journals/csysl/BaranwalGPH21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A Fixed-Time Convergent Distributed Algorithm for Strongly Convex Functions in a Time-Varying Network.
CDC
@inproceedings{DBLP:conf/cdc/GargBP20,
author = {Kunal Garg and
Mayank Baranwal and
Dimitra Panagou},
title = {A Fixed-Time Convergent Distributed Algorithm for Strongly Convex
Functions in a Time-Varying Network},
booktitle = {59th {IEEE} Conference on Decision and Control, {CDC} 2020, Jeju Island,
South Korea, December 14-18, 2020},
pages = {4405--4410},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.1109/CDC42340.2020.9303778},
doi = {10.1109/CDC42340.2020.9303778},
timestamp = {Fri, 04 Mar 2022 13:31:02 +0100},
biburl = {https://dblp.org/rec/conf/cdc/GargBP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A Quadratic Program based Control Synthesis under Spatiotemporal Constraints and Non-vanishing Disturbances.
CDC
@inproceedings{DBLP:conf/cdc/BlackGP20,
author = {Mitchell Black and
Kunal Garg and
Dimitra Panagou},
title = {A Quadratic Program based Control Synthesis under Spatiotemporal Constraints
and Non-vanishing Disturbances},
booktitle = {59th {IEEE} Conference on Decision and Control, {CDC} 2020, Jeju Island,
South Korea, December 14-18, 2020},
pages = {2726--2731},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.1109/CDC42340.2020.9304071},
doi = {10.1109/CDC42340.2020.9304071},
timestamp = {Fri, 04 Mar 2022 13:31:02 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BlackGP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Decentralized Goal Assignment and Safe Trajectory Generation in Multirobot Networks via Multiple Lyapunov Functions.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/PanagouTK20,
author = {Dimitra Panagou and
Matthew Turpin and
Vijay Kumar},
title = {Decentralized Goal Assignment and Safe Trajectory Generation in Multirobot
Networks via Multiple Lyapunov Functions},
journal = {{IEEE} Trans. Autom. Control.},
volume = {65},
number = {8},
pages = {3365--3380},
year = {2020},
url = {https://doi.org/10.1109/TAC.2019.2946333},
doi = {10.1109/TAC.2019.2946333},
timestamp = {Wed, 26 Aug 2020 11:05:09 +0200},
biburl = {https://dblp.org/rec/journals/tac/PanagouTK20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Determining r- and (r, s)-robustness of digraphs using mixed integer linear programming.
Autom.
@article{DBLP:journals/automatica/UsevitchP20,
author = {James Usevitch and
Dimitra Panagou},
title = {Determining r- and (r, s)-robustness of digraphs using mixed integer
linear programming},
journal = {Autom.},
volume = {111},
year = {2020},
url = {https://doi.org/10.1016/j.automatica.2019.108586},
doi = {10.1016/J.AUTOMATICA.2019.108586},
timestamp = {Thu, 20 Feb 2020 09:13:58 +0100},
biburl = {https://dblp.org/rec/journals/automatica/UsevitchP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}LIV-LAM: LiDAR and Visual Localization and Mapping.
ACC
@inproceedings{DBLP:conf/amcc/RadmaneshWCTP20,
author = {Reza Radmanesh and
Ziyin Wang and
Vishnu S. Chipade and
Gavriil Tsechpenakis and
Dimitra Panagou},
title = {{LIV-LAM:} LiDAR and Visual Localization and Mapping},
booktitle = {2020 American Control Conference, {ACC} 2020, Denver, CO, USA, July
1-3, 2020},
pages = {659--664},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.23919/ACC45564.2020.9148037},
doi = {10.23919/ACC45564.2020.9148037},
timestamp = {Thu, 14 Oct 2021 10:23:23 +0200},
biburl = {https://dblp.org/rec/conf/amcc/RadmaneshWCTP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multi-Swarm Herding: Protecting against Adversarial Swarms.
CDC
@inproceedings{DBLP:conf/cdc/ChipadeP20,
author = {Vishnu S. Chipade and
Dimitra Panagou},
title = {Multi-Swarm Herding: Protecting against Adversarial Swarms},
booktitle = {59th {IEEE} Conference on Decision and Control, {CDC} 2020, Jeju Island,
South Korea, December 14-18, 2020},
pages = {5374--5379},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.1109/CDC42340.2020.9303837},
doi = {10.1109/CDC42340.2020.9303837},
timestamp = {Fri, 04 Mar 2022 13:31:02 +0100},
biburl = {https://dblp.org/rec/conf/cdc/ChipadeP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Prescribed-time Convergence with Input Constraints: A Control Lyapunov Function Based Approach.
ACC
@inproceedings{DBLP:conf/amcc/GargAP20,
author = {Kunal Garg and
Ehsan Arabi and
Dimitra Panagou},
title = {Prescribed-time Convergence with Input Constraints: {A} Control Lyapunov
Function Based Approach},
booktitle = {2020 American Control Conference, {ACC} 2020, Denver, CO, USA, July
1-3, 2020},
pages = {962--967},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.23919/ACC45564.2020.9147641},
doi = {10.23919/ACC45564.2020.9147641},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/GargAP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Quadratic Programs for High Relative Degree Spatial Constraints and Spatiotemporal Specifications with Spacecraft Applications.
CDC
@inproceedings{DBLP:conf/cdc/BreedenP20,
author = {Joseph Breeden and
Dimitra Panagou},
title = {Quadratic Programs for High Relative Degree Spatial Constraints and
Spatiotemporal Specifications with Spacecraft Applications},
booktitle = {59th {IEEE} Conference on Decision and Control, {CDC} 2020, Jeju Island,
South Korea, December 14-18, 2020},
pages = {1496--1502},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.1109/CDC42340.2020.9304162},
doi = {10.1109/CDC42340.2020.9304162},
timestamp = {Fri, 04 Mar 2022 13:31:02 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BreedenP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Resilient Finite-Time Consensus: A Discontinuous Systems Perspective.
ACC
@inproceedings{DBLP:conf/amcc/UsevitchP20,
author = {James Usevitch and
Dimitra Panagou},
title = {Resilient Finite-Time Consensus: {A} Discontinuous Systems Perspective},
booktitle = {2020 American Control Conference, {ACC} 2020, Denver, CO, USA, July
1-3, 2020},
pages = {3285--3290},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.23919/ACC45564.2020.9147904},
doi = {10.23919/ACC45564.2020.9147904},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/UsevitchP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Resilient Leader-Follower Consensus to Arbitrary Reference Values in Time-Varying Graphs.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/UsevitchP20,
author = {James Usevitch and
Dimitra Panagou},
title = {Resilient Leader-Follower Consensus to Arbitrary Reference Values
in Time-Varying Graphs},
journal = {{IEEE} Trans. Autom. Control.},
volume = {65},
number = {4},
pages = {1755--1762},
year = {2020},
url = {https://doi.org/10.1109/TAC.2019.2934954},
doi = {10.1109/TAC.2019.2934954},
timestamp = {Tue, 30 Jun 2020 11:42:39 +0200},
biburl = {https://dblp.org/rec/journals/tac/UsevitchP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Safety-Critical Adaptive Control with Nonlinear Reference Model Systems.
ACC
@inproceedings{DBLP:conf/amcc/ArabiGP20,
author = {Ehsan Arabi and
Kunal Garg and
Dimitra Panagou},
title = {Safety-Critical Adaptive Control with Nonlinear Reference Model Systems},
booktitle = {2020 American Control Conference, {ACC} 2020, Denver, CO, USA, July
1-3, 2020},
pages = {1749--1754},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.23919/ACC45564.2020.9147999},
doi = {10.23919/ACC45564.2020.9147999},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ArabiGP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Strong Invariance Using Control Barrier Functions: A Clarke Tangent Cone Approach.
CDC
@inproceedings{DBLP:conf/cdc/UsevitchGP20,
author = {James Usevitch and
Kunal Garg and
Dimitra Panagou},
title = {Strong Invariance Using Control Barrier Functions: {A} Clarke Tangent
Cone Approach},
booktitle = {59th {IEEE} Conference on Decision and Control, {CDC} 2020, Jeju Island,
South Korea, December 14-18, 2020},
pages = {2044--2049},
publisher = {{IEEE}},
year = {2020},
url = {https://doi.org/10.1109/CDC42340.2020.9303873},
doi = {10.1109/CDC42340.2020.9303873},
timestamp = {Fri, 04 Mar 2022 13:31:02 +0100},
biburl = {https://dblp.org/rec/conf/cdc/UsevitchGP20.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A hybrid approach to persistent coverage in stochastic environments.
Autom.
@article{DBLP:journals/automatica/BentzP19,
author = {William Bentz and
Dimitra Panagou},
title = {A hybrid approach to persistent coverage in stochastic environments},
journal = {Autom.},
volume = {109},
year = {2019},
url = {https://doi.org/10.1016/j.automatica.2019.108554},
doi = {10.1016/J.AUTOMATICA.2019.108554},
timestamp = {Thu, 20 Feb 2020 09:15:52 +0100},
biburl = {https://dblp.org/rec/journals/automatica/BentzP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A predictive vector-field based lane-changing controller.
CDC
@inproceedings{DBLP:conf/cdc/HuangP19,
author = {Lixing Huang and
Dimitra Panagou},
title = {A predictive vector-field based lane-changing controller},
booktitle = {58th {IEEE} Conference on Decision and Control, {CDC} 2019, Nice,
France, December 11-13, 2019},
pages = {5748--5753},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/CDC40024.2019.9029640},
doi = {10.1109/CDC40024.2019.9029640},
timestamp = {Fri, 04 Mar 2022 13:30:46 +0100},
biburl = {https://dblp.org/rec/conf/cdc/HuangP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Control-Lyapunov and Control-Barrier Functions based Quadratic Program for Spatio-temporal Specifications.
CDC
@inproceedings{DBLP:conf/cdc/GargP19,
author = {Kunal Garg and
Dimitra Panagou},
title = {Control-Lyapunov and Control-Barrier Functions based Quadratic Program
for Spatio-temporal Specifications},
booktitle = {58th {IEEE} Conference on Decision and Control, {CDC} 2019, Nice,
France, December 11-13, 2019},
pages = {1422--1429},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/CDC40024.2019.9029666},
doi = {10.1109/CDC40024.2019.9029666},
timestamp = {Fri, 04 Mar 2022 13:30:46 +0100},
biburl = {https://dblp.org/rec/conf/cdc/GargP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Determining r-Robustness of Digraphs Using Mixed Integer Linear Programming.
ACC
@inproceedings{DBLP:conf/amcc/UsevitchP19,
author = {James Usevitch and
Dimitra Panagou},
title = {Determining r-Robustness of Digraphs Using Mixed Integer Linear Programming},
booktitle = {2019 American Control Conference, {ACC} 2019, Philadelphia, PA, USA,
July 10-12, 2019},
pages = {2257--2263},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.23919/ACC.2019.8814405},
doi = {10.23919/ACC.2019.8814405},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/UsevitchP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Herding an Adversarial Attacker to a Safe Area for Defending Safety-Critical Infrastructure.
ACC
@inproceedings{DBLP:conf/amcc/ChipadeP19,
author = {Vishnu S. Chipade and
Dimitra Panagou},
title = {Herding an Adversarial Attacker to a Safe Area for Defending Safety-Critical
Infrastructure},
booktitle = {2019 American Control Conference, {ACC} 2019, Philadelphia, PA, USA,
July 10-12, 2019},
pages = {1035--1041},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.23919/ACC.2019.8814380},
doi = {10.23919/ACC.2019.8814380},
timestamp = {Thu, 14 Oct 2021 10:23:10 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ChipadeP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Herding an Adversarial Swarm in an Obstacle Environment.
CDC
@inproceedings{DBLP:conf/cdc/ChipadeP19,
author = {Vishnu S. Chipade and
Dimitra Panagou},
title = {Herding an Adversarial Swarm in an Obstacle Environment},
booktitle = {58th {IEEE} Conference on Decision and Control, {CDC} 2019, Nice,
France, December 11-13, 2019},
pages = {3685--3690},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/CDC40024.2019.9029573},
doi = {10.1109/CDC40024.2019.9029573},
timestamp = {Fri, 04 Mar 2022 13:30:46 +0100},
biburl = {https://dblp.org/rec/conf/cdc/ChipadeP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Intention-Aware Supervisory Control with Driving Safety Applications.
CCTA
@inproceedings{DBLP:conf/ccta/SahinLRPYO19,
author = {Yunus Emre Sahin and
Zexiang Liu and
Kwesi J. Rutledge and
Dimitra Panagou and
Sze Zheng Yong and
Necmiye Ozay},
title = {Intention-Aware Supervisory Control with Driving Safety Applications},
booktitle = {2019 {IEEE} Conference on Control Technology and Applications, {CCTA}
2019, Hong Kong, SAR, China, August 19-21, 2019},
pages = {1--8},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/CCTA.2019.8920426},
doi = {10.1109/CCTA.2019.8920426},
timestamp = {Wed, 07 Dec 2022 23:10:43 +0100},
biburl = {https://dblp.org/rec/conf/ccta/SahinLRPYO19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multi-agent adaptive estimation with consensus in reproducing kernel Hilbert spaces.
ECC
@inproceedings{DBLP:conf/eucc/BobadePK19,
author = {Parag Bobade and
Dimitra Panagou and
Andrew J. Kurdila},
title = {Multi-agent adaptive estimation with consensus in reproducing kernel
Hilbert spaces},
booktitle = {17th European Control Conference, {ECC} 2019, Naples, Italy, June
25-28, 2019},
pages = {572--577},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.23919/ECC.2019.8796214},
doi = {10.23919/ECC.2019.8796214},
timestamp = {Sun, 02 Oct 2022 16:00:47 +0200},
biburl = {https://dblp.org/rec/conf/eucc/BobadePK19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Resilient Leader-Follower Consensus with Time-Varying Leaders in Discrete-Time Systems.
CDC
@inproceedings{DBLP:conf/cdc/UsevitchP19,
author = {James Usevitch and
Dimitra Panagou},
title = {Resilient Leader-Follower Consensus with Time-Varying Leaders in Discrete-Time
Systems},
booktitle = {58th {IEEE} Conference on Decision and Control, {CDC} 2019, Nice,
France, December 11-13, 2019},
pages = {5432--5437},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/CDC40024.2019.9030246},
doi = {10.1109/CDC40024.2019.9030246},
timestamp = {Fri, 04 Mar 2022 13:30:46 +0100},
biburl = {https://dblp.org/rec/conf/cdc/UsevitchP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust Multitask Formation Control via Parametric Lyapunov-Like Barrier Functions.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/HanP19,
author = {Dongkun Han and
Dimitra Panagou},
title = {Robust Multitask Formation Control via Parametric Lyapunov-Like Barrier
Functions},
journal = {{IEEE} Trans. Autom. Control.},
volume = {64},
number = {11},
pages = {4439--4453},
year = {2019},
url = {https://doi.org/10.1109/TAC.2019.2894587},
doi = {10.1109/TAC.2019.2894587},
timestamp = {Wed, 20 May 2020 21:28:39 +0200},
biburl = {https://dblp.org/rec/journals/tac/HanP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Safe Autonomous Overtaking with Intention Estimation.
ECC
@inproceedings{DBLP:conf/eucc/ChipadeSHOYP19,
author = {Vishnu S. Chipade and
Qiang Shen and
Lixing Huang and
Necmiye Ozay and
Sze Zheng Yong and
Dimitra Panagou},
title = {Safe Autonomous Overtaking with Intention Estimation},
booktitle = {17th European Control Conference, {ECC} 2019, Naples, Italy, June
25-28, 2019},
pages = {2050--2057},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.23919/ECC.2019.8795715},
doi = {10.23919/ECC.2019.8795715},
timestamp = {Wed, 07 Dec 2022 23:07:12 +0100},
biburl = {https://dblp.org/rec/conf/eucc/ChipadeSHOYP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Safe Multiquadcopter System Continuum Deformation Over Moving Frames.
IEEE Trans. Control. Netw. Syst.
@article{DBLP:journals/tcns/RastgoftarAP19,
author = {Hossein Rastgoftar and
Ella M. Atkins and
Dimitra Panagou},
title = {Safe Multiquadcopter System Continuum Deformation Over Moving Frames},
journal = {{IEEE} Trans. Control. Netw. Syst.},
volume = {6},
number = {2},
pages = {737--749},
year = {2019},
url = {https://doi.org/10.1109/TCNS.2018.2873204},
doi = {10.1109/TCNS.2018.2873204},
timestamp = {Thu, 09 Apr 2020 17:10:56 +0200},
biburl = {https://dblp.org/rec/journals/tcns/RastgoftarAP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Unsupervised Learning of Assistive Camera Views by an Aerial Co-robot in Augmented Reality Multitasking Environments.
ICRA
@inproceedings{DBLP:conf/icra/BentzDP19,
author = {William Bentz and
Sahib Dhanjal and
Dimitra Panagou},
title = {Unsupervised Learning of Assistive Camera Views by an Aerial Co-robot
in Augmented Reality Multitasking Environments},
booktitle = {International Conference on Robotics and Automation, {ICRA} 2019,
Montreal, QC, Canada, May 20-24, 2019},
pages = {3003--3009},
publisher = {{IEEE}},
year = {2019},
url = {https://doi.org/10.1109/ICRA.2019.8793587},
doi = {10.1109/ICRA.2019.8793587},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/icra/BentzDP19.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}3-D Decentralized Prioritized Motion Planning and Coordination for High-Density Operations of Micro Aerial Vehicles.
IEEE Trans. Control. Syst. Technol.
@article{DBLP:journals/tcst/MaJWP18,
author = {Xiaobai Ma and
Ziyuan Jiao and
Zhenkai Wang and
Dimitra Panagou},
title = {3-D Decentralized Prioritized Motion Planning and Coordination for
High-Density Operations of Micro Aerial Vehicles},
journal = {{IEEE} Trans. Control. Syst. Technol.},
volume = {26},
number = {3},
pages = {939--953},
year = {2018},
url = {https://doi.org/10.1109/TCST.2017.2699165},
doi = {10.1109/TCST.2017.2699165},
timestamp = {Mon, 08 Jun 2020 22:20:35 +0200},
biburl = {https://dblp.org/rec/journals/tcst/MaJWP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Approximating the Region of Multi-Task Coordination via the Optimal Lyapunov-Like Barrier Function.
ACC
@inproceedings{DBLP:conf/amcc/HanHP18,
author = {Dongkun Han and
Lixing Huang and
Dimitra Panagou},
title = {Approximating the Region of Multi-Task Coordination via the Optimal
Lyapunov-Like Barrier Function},
booktitle = {2018 Annual American Control Conference, {ACC} 2018, Milwaukee, WI,
USA, June 27-29, 2018},
pages = {5070--5075},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.23919/ACC.2018.8431021},
doi = {10.23919/ACC.2018.8431021},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/HanHP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Bayesian-inferred Flexible Path Generation in Human-Robot Collaborative Networks.
IROS
@inproceedings{DBLP:conf/iros/BentzP18,
author = {William Bentz and
Dimitra Panagou},
title = {Bayesian-inferred Flexible Path Generation in Human-Robot Collaborative
Networks},
booktitle = {2018 {IEEE/RSJ} International Conference on Intelligent Robots and
Systems, {IROS} 2018, Madrid, Spain, October 1-5, 2018},
pages = {1816--1822},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.1109/IROS.2018.8593611},
doi = {10.1109/IROS.2018.8593611},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/iros/BentzP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Complete 3-D dynamic coverage in energy-constrained multi-UAV sensor networks.
Auton. Robots
@article{DBLP:journals/arobots/BentzHBP18,
author = {William Bentz and
Tru Hoang and
Enkhmurun Bayasgalan and
Dimitra Panagou},
title = {Complete 3-D dynamic coverage in energy-constrained multi-UAV sensor
networks},
journal = {Auton. Robots},
volume = {42},
number = {4},
pages = {825--851},
year = {2018},
url = {https://doi.org/10.1007/s10514-017-9661-x},
doi = {10.1007/S10514-017-9661-X},
timestamp = {Sat, 17 Mar 2018 15:02:27 +0100},
biburl = {https://dblp.org/rec/journals/arobots/BentzHBP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Energy-aware Persistent Coverage and Intruder Interception in 3D Dynamic Environments.
ACC
@inproceedings{DBLP:conf/amcc/BentzP18,
author = {William Bentz and
Dimitra Panagou},
title = {Energy-aware Persistent Coverage and Intruder Interception in 3D Dynamic
Environments},
booktitle = {2018 Annual American Control Conference, {ACC} 2018, Milwaukee, WI,
USA, June 27-29, 2018},
pages = {4426--4433},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.23919/ACC.2018.8431191},
doi = {10.23919/ACC.2018.8431191},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/BentzP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Finite-Time Resilient Formation Control with Bounded Inputs.
CDC
@inproceedings{DBLP:conf/cdc/UsevitchGP18,
author = {James Usevitch and
Kunal Garg and
Dimitra Panagou},
title = {Finite-Time Resilient Formation Control with Bounded Inputs},
booktitle = {57th {IEEE} Conference on Decision and Control, {CDC} 2018, Miami,
FL, USA, December 17-19, 2018},
pages = {2567--2574},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.1109/CDC.2018.8619697},
doi = {10.1109/CDC.2018.8619697},
timestamp = {Fri, 04 Mar 2022 13:30:11 +0100},
biburl = {https://dblp.org/rec/conf/cdc/UsevitchGP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Hierarchical Design of Highway Merging Controller Using Navigation Vector Fields Under Bounded Sensing Uncertainty.
DARS
@inproceedings{DBLP:conf/dars/HuangP18,
author = {Lixing Huang and
Dimitra Panagou},
editor = {Nikolaus Correll and
Mac Schwager and
Michael W. Otte},
title = {Hierarchical Design of Highway Merging Controller Using Navigation
Vector Fields Under Bounded Sensing Uncertainty},
booktitle = {Distributed Autonomous Robotic Systems, The 14th International Symposium,
{DARS} 2018, Boulder, CO, USA, October 15-17, 2018},
series = {Springer Proceedings in Advanced Robotics},
volume = {9},
pages = {341--356},
publisher = {Springer},
year = {2018},
url = {https://doi.org/10.1007/978-3-030-05816-6\_24},
doi = {10.1007/978-3-030-05816-6\_24},
timestamp = {Tue, 05 Mar 2019 11:11:05 +0100},
biburl = {https://dblp.org/rec/conf/dars/HuangP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}New Results on Finite-Time Stability: Geometric Conditions and Finite-Time Controllers.
ACC
@inproceedings{DBLP:conf/amcc/GargP18,
author = {Kunal Garg and
Dimitra Panagou},
title = {New Results on Finite-Time Stability: Geometric Conditions and Finite-Time
Controllers},
booktitle = {2018 Annual American Control Conference, {ACC} 2018, Milwaukee, WI,
USA, June 27-29, 2018},
pages = {442--447},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.23919/ACC.2018.8431699},
doi = {10.23919/ACC.2018.8431699},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/GargP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Resilient Leader-Follower Consensus to Arbitrary Reference Values.
ACC
@inproceedings{DBLP:conf/amcc/UsevitchP18,
author = {James Usevitch and
Dimitra Panagou},
title = {Resilient Leader-Follower Consensus to Arbitrary Reference Values},
booktitle = {2018 Annual American Control Conference, {ACC} 2018, Milwaukee, WI,
USA, June 27-29, 2018},
pages = {1292--1298},
publisher = {{IEEE}},
year = {2018},
url = {https://doi.org/10.23919/ACC.2018.8431573},
doi = {10.23919/ACC.2018.8431573},
timestamp = {Sun, 08 Aug 2021 01:40:57 +0200},
biburl = {https://dblp.org/rec/conf/amcc/UsevitchP18.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A Distributed Feedback Motion Planning Protocol for Multiple Unicycle Agents of Different Classes.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/Panagou17,
author = {Dimitra Panagou},
title = {A Distributed Feedback Motion Planning Protocol for Multiple Unicycle
Agents of Different Classes},
journal = {{IEEE} Trans. Autom. Control.},
volume = {62},
number = {3},
pages = {1178--1193},
year = {2017},
url = {https://doi.org/10.1109/TAC.2016.2576020},
doi = {10.1109/TAC.2016.2576020},
timestamp = {Wed, 20 May 2020 21:27:50 +0200},
biburl = {https://dblp.org/rec/journals/tac/Panagou17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Automated turning and merging for autonomous vehicles using a Nonlinear Model Predictive Control approach.
ACC
@inproceedings{DBLP:conf/amcc/HuangP17a,
author = {Lixing Huang and
Dimitra Panagou},
title = {Automated turning and merging for autonomous vehicles using a Nonlinear
Model Predictive Control approach},
booktitle = {2017 American Control Conference, {ACC} 2017, Seattle, WA, USA, May
24-26, 2017},
pages = {5525--5531},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.23919/ACC.2017.7963814},
doi = {10.23919/ACC.2017.7963814},
timestamp = {Fri, 03 Dec 2021 13:04:31 +0100},
biburl = {https://dblp.org/rec/conf/amcc/HuangP17a.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Chebyshev approximation and higher order derivatives of Lyapunov functions for estimating the domain of attraction.
CDC
@inproceedings{DBLP:conf/cdc/HanP17a,
author = {Dongkun Han and
Dimitra Panagou},
title = {Chebyshev approximation and higher order derivatives of Lyapunov functions
for estimating the domain of attraction},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {1181--1186},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8263816},
doi = {10.1109/CDC.2017.8263816},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/HanP17a.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Control strategies for multiplayer target-attacker-defender differential games with double integrator dynamics.
CDC
@inproceedings{DBLP:conf/cdc/CoonP17,
author = {Mitchell Coon and
Dimitra Panagou},
title = {Control strategies for multiplayer target-attacker-defender differential
games with double integrator dynamics},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {1496--1502},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8263864},
doi = {10.1109/CDC.2017.8263864},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/CoonP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Distributed Dynamic Coverage and Avoidance Control Under Anisotropic Sensing.
IEEE Trans. Control. Netw. Syst.
@article{DBLP:journals/tcns/PanagouSV17,
author = {Dimitra Panagou and
Dusan M. Stipanovic and
Petros G. Voulgaris},
title = {Distributed Dynamic Coverage and Avoidance Control Under Anisotropic
Sensing},
journal = {{IEEE} Trans. Control. Netw. Syst.},
volume = {4},
number = {4},
pages = {850--862},
year = {2017},
url = {https://doi.org/10.1109/TCNS.2016.2576403},
doi = {10.1109/TCNS.2016.2576403},
timestamp = {Tue, 21 Mar 2023 21:14:27 +0100},
biburl = {https://dblp.org/rec/journals/tcns/PanagouSV17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Distributed multi-task formation control under parametric communication uncertainties.
CDC
@inproceedings{DBLP:conf/cdc/HanP17,
author = {Dongkun Han and
Dimitra Panagou},
title = {Distributed multi-task formation control under parametric communication
uncertainties},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {405--410},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8263698},
doi = {10.1109/CDC.2017.8263698},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/HanP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Persistent coverage of a two-dimensional manifold subject to time-varying disturbances.
CDC
@inproceedings{DBLP:conf/cdc/BentzP17,
author = {William Bentz and
Dimitra Panagou},
title = {Persistent coverage of a two-dimensional manifold subject to time-varying
disturbances},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {387--392},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8263695},
doi = {10.1109/CDC.2017.8263695},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BentzP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}r-Robustness and (r, s)-robustness of circulant graphs.
CDC
@inproceedings{DBLP:conf/cdc/UsevitchP17,
author = {James Usevitch and
Dimitra Panagou},
title = {r-Robustness and (r, s)-robustness of circulant graphs},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {4416--4421},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8264310},
doi = {10.1109/CDC.2017.8264310},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/UsevitchP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Robust semi-cooperative multi-agent coordination in the presence of stochastic disturbances.
CDC
@inproceedings{DBLP:conf/cdc/GargHP17,
author = {Kunal Garg and
Dongkun Han and
Dimitra Panagou},
title = {Robust semi-cooperative multi-agent coordination in the presence of
stochastic disturbances},
booktitle = {56th {IEEE} Annual Conference on Decision and Control, {CDC} 2017,
Melbourne, Australia, December 12-15, 2017},
pages = {3443--3448},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.1109/CDC.2017.8264163},
doi = {10.1109/CDC.2017.8264163},
timestamp = {Fri, 04 Mar 2022 13:29:55 +0100},
biburl = {https://dblp.org/rec/conf/cdc/GargHP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Vision-based target tracking and autonomous landing of a quadrotor on a ground vehicle.
ACC
@inproceedings{DBLP:conf/amcc/HoangBWTP17,
author = {Tru Hoang and
Enkhmurun Bayasgalan and
Ziyin Wang and
Gavriil Tsechpenakis and
Dimitra Panagou},
title = {Vision-based target tracking and autonomous landing of a quadrotor
on a ground vehicle},
booktitle = {2017 American Control Conference, {ACC} 2017, Seattle, WA, USA, May
24-26, 2017},
pages = {5580--5585},
publisher = {{IEEE}},
year = {2017},
url = {https://doi.org/10.23919/ACC.2017.7963823},
doi = {10.23919/ACC.2017.7963823},
timestamp = {Fri, 03 Dec 2021 13:04:31 +0100},
biburl = {https://dblp.org/rec/conf/amcc/HoangBWTP17.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}An energy-aware redistribution method for multi-agent dynamic coverage networks.
CDC
@inproceedings{DBLP:conf/cdc/BentzP16,
author = {William Bentz and
Dimitra Panagou},
title = {An energy-aware redistribution method for multi-agent dynamic coverage
networks},
booktitle = {55th {IEEE} Conference on Decision and Control, {CDC} 2016, Las Vegas,
NV, USA, December 12-14, 2016},
pages = {2644--2651},
publisher = {{IEEE}},
year = {2016},
url = {https://doi.org/10.1109/CDC.2016.7798661},
doi = {10.1109/CDC.2016.7798661},
timestamp = {Fri, 04 Mar 2022 13:29:43 +0100},
biburl = {https://dblp.org/rec/conf/cdc/BentzP16.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Distributed Coordination Control for Multi-Robot Networks Using Lyapunov-Like Barrier Functions.
IEEE Trans. Autom. Control.
@article{DBLP:journals/tac/PanagouSV16,
author = {Dimitra Panagou and
Dusan M. Stipanovic and
Petros G. Voulgaris},
title = {Distributed Coordination Control for Multi-Robot Networks Using Lyapunov-Like
Barrier Functions},
journal = {{IEEE} Trans. Autom. Control.},
volume = {61},
number = {3},
pages = {617--632},
year = {2016},
url = {https://doi.org/10.1109/TAC.2015.2444131},
doi = {10.1109/TAC.2015.2444131},
timestamp = {Tue, 21 Mar 2023 21:12:59 +0100},
biburl = {https://dblp.org/rec/journals/tac/PanagouSV16.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multi-agent motion planning and coordination in polygonal environments using vector fields and model predictive control.
ECC
@inproceedings{DBLP:conf/eucc/HegdeP16,
author = {Rashmi Hegde and
Dimitra Panagou},
title = {Multi-agent motion planning and coordination in polygonal environments
using vector fields and model predictive control},
booktitle = {15th European Control Conference, {ECC} 2016, Aalborg, Denmark, June
29 - July 1, 2016},
pages = {1856--1861},
publisher = {{IEEE}},
year = {2016},
url = {https://doi.org/10.1109/ECC.2016.7810561},
doi = {10.1109/ECC.2016.7810561},
timestamp = {Tue, 01 Jun 2021 15:22:59 +0200},
biburl = {https://dblp.org/rec/conf/eucc/HegdeP16.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Real-time model predictive control for keeping a quadrotor visible on the camera field-of-view of a ground robot.
ACC
@inproceedings{DBLP:conf/amcc/DingGSCP16,
author = {Wei Ding and
Madan Ravi Ganesh and
Robert N. Severinghaus and
Jason J. Corso and
Dimitra Panagou},
title = {Real-time model predictive control for keeping a quadrotor visible
on the camera field-of-view of a ground robot},
booktitle = {2016 American Control Conference, {ACC} 2016, Boston, MA, USA, July
6-8, 2016},
pages = {2259--2264},
publisher = {{IEEE}},
year = {2016},
url = {https://doi.org/10.1109/ACC.2016.7525254},
doi = {10.1109/ACC.2016.7525254},
timestamp = {Sat, 30 Sep 2023 09:34:15 +0200},
biburl = {https://dblp.org/rec/conf/amcc/DingGSCP16.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Distributed coordination protocols for aggregation and navigation in multi-agent systems under local directed interactions.
CDC
@inproceedings{DBLP:conf/cdc/Panagou15,
author = {Dimitra Panagou},
title = {Distributed coordination protocols for aggregation and navigation
in multi-agent systems under local directed interactions},
booktitle = {54th {IEEE} Conference on Decision and Control, {CDC} 2015, Osaka,
Japan, December 15-18, 2015},
pages = {2780--2785},
publisher = {{IEEE}},
year = {2015},
url = {https://doi.org/10.1109/CDC.2015.7402637},
doi = {10.1109/CDC.2015.7402637},
timestamp = {Wed, 16 Oct 2019 14:14:56 +0200},
biburl = {https://dblp.org/rec/conf/cdc/Panagou15.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Dynamic Coverage Control in Unicycle Multi-Robot Networks under Anisotropic Sensing.
Frontiers Robotics AI
@article{DBLP:journals/firai/PanagouSV15,
author = {Dimitra Panagou and
Dusan M. Stipanovic and
Petros G. Voulgaris},
title = {Dynamic Coverage Control in Unicycle Multi-Robot Networks under Anisotropic
Sensing},
journal = {Frontiers Robotics {AI}},
volume = {2},
pages = {3},
year = {2015},
url = {https://doi.org/10.3389/frobt.2015.00003},
doi = {10.3389/FROBT.2015.00003},
timestamp = {Tue, 21 Mar 2023 21:08:09 +0100},
biburl = {https://dblp.org/rec/journals/firai/PanagouSV15.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Cooperative Visibility Maintenance for Leader-Follower Formations in Obstacle Environments.
IEEE Trans. Robotics
@article{DBLP:journals/trob/PanagouK14,
author = {Dimitra Panagou and
Vijay Kumar},
title = {Cooperative Visibility Maintenance for Leader-Follower Formations
in Obstacle Environments},
journal = {{IEEE} Trans. Robotics},
volume = {30},
number = {4},
pages = {831--844},
year = {2014},
url = {https://doi.org/10.1109/TRO.2014.2304774},
doi = {10.1109/TRO.2014.2304774},
timestamp = {Sat, 20 May 2017 00:25:23 +0200},
biburl = {https://dblp.org/rec/journals/trob/PanagouK14.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Decentralized goal assignment and trajectory generation in multi-robot networks: A multiple Lyapunov functions approach.
ICRA
@inproceedings{DBLP:conf/icra/PanagouTK14,
author = {Dimitra Panagou and
Matthew Turpin and
Vijay Kumar},
title = {Decentralized goal assignment and trajectory generation in multi-robot
networks: {A} multiple Lyapunov functions approach},
booktitle = {2014 {IEEE} International Conference on Robotics and Automation, {ICRA}
2014, Hong Kong, China, May 31 - June 7, 2014},
pages = {6757--6762},
publisher = {{IEEE}},
year = {2014},
url = {https://doi.org/10.1109/ICRA.2014.6907857},
doi = {10.1109/ICRA.2014.6907857},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/icra/PanagouTK14.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Dynamic positioning for an underactuated marine vehicle using hybrid control.
Int. J. Control
@article{DBLP:journals/ijcon/PanagouK14,
author = {Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Dynamic positioning for an underactuated marine vehicle using hybrid
control},
journal = {Int. J. Control},
volume = {87},
number = {2},
pages = {264--280},
year = {2014},
url = {https://doi.org/10.1080/00207179.2013.828853},
doi = {10.1080/00207179.2013.828853},
timestamp = {Mon, 06 Nov 2017 12:13:15 +0100},
biburl = {https://dblp.org/rec/journals/ijcon/PanagouK14.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Motion planning and collision avoidance using navigation vector fields.
ICRA
@inproceedings{DBLP:conf/icra/Panagou14,
author = {Dimitra Panagou},
title = {Motion planning and collision avoidance using navigation vector fields},
booktitle = {2014 {IEEE} International Conference on Robotics and Automation, {ICRA}
2014, Hong Kong, China, May 31 - June 7, 2014},
pages = {2513--2518},
publisher = {{IEEE}},
year = {2014},
url = {https://doi.org/10.1109/ICRA.2014.6907210},
doi = {10.1109/ICRA.2014.6907210},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/icra/Panagou14.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Vision-based dynamic coverage control for nonholonomic agents.
CDC
@inproceedings{DBLP:conf/cdc/PanagouSV14,
author = {Dimitra Panagou and
Dusan M. Stipanovic and
Petros G. Voulgaris},
title = {Vision-based dynamic coverage control for nonholonomic agents},
booktitle = {53rd {IEEE} Conference on Decision and Control, {CDC} 2014, Los Angeles,
CA, USA, December 15-17, 2014},
pages = {2198--2203},
publisher = {{IEEE}},
year = {2014},
url = {https://doi.org/10.1109/CDC.2014.7039724},
doi = {10.1109/CDC.2014.7039724},
timestamp = {Tue, 21 Mar 2023 20:52:20 +0100},
biburl = {https://dblp.org/rec/conf/cdc/PanagouSV14.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Cooperative formation control of underactuated marine vehicles for target surveillance under sensing and communication constraints.
ICRA
@inproceedings{DBLP:conf/icra/PanagouK13,
author = {Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Cooperative formation control of underactuated marine vehicles for
target surveillance under sensing and communication constraints},
booktitle = {2013 {IEEE} International Conference on Robotics and Automation, Karlsruhe,
Germany, May 6-10, 2013},
pages = {1871--1876},
publisher = {{IEEE}},
year = {2013},
url = {https://doi.org/10.1109/ICRA.2013.6630824},
doi = {10.1109/ICRA.2013.6630824},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/icra/PanagouK13.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Model Predictive Control for the navigation of a nonholonomic vehicle with field-of-view constraints.
ACC
@inproceedings{DBLP:conf/amcc/ManiatopoulosPK13,
author = {Spyros Maniatopoulos and
Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Model Predictive Control for the navigation of a nonholonomic vehicle
with field-of-view constraints},
booktitle = {American Control Conference, {ACC} 2013, Washington, DC, USA, June
17-19, 2013},
pages = {3967--3972},
publisher = {{IEEE}},
year = {2013},
url = {https://doi.org/10.1109/ACC.2013.6580446},
doi = {10.1109/ACC.2013.6580446},
timestamp = {Sun, 08 Aug 2021 01:40:56 +0200},
biburl = {https://dblp.org/rec/conf/amcc/ManiatopoulosPK13.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Multi-objective control for multi-agent systems using Lyapunov-like barrier functions.
CDC
@inproceedings{DBLP:conf/cdc/PanagouSV13,
author = {Dimitra Panagou and
Dusan M. Stipanovic and
Petros G. Voulgaris},
title = {Multi-objective control for multi-agent systems using Lyapunov-like
barrier functions},
booktitle = {Proceedings of the 52nd {IEEE} Conference on Decision and Control,
{CDC} 2013, Florence, Italy, December 10-13, 2013},
pages = {1478--1483},
publisher = {{IEEE}},
year = {2013},
url = {https://doi.org/10.1109/CDC.2013.6760091},
doi = {10.1109/CDC.2013.6760091},
timestamp = {Tue, 21 Mar 2023 20:52:20 +0100},
biburl = {https://dblp.org/rec/conf/cdc/PanagouSV13.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Viability control for a class of underactuated systems.
Autom.
@article{DBLP:journals/automatica/PanagouK13,
author = {Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Viability control for a class of underactuated systems},
journal = {Autom.},
volume = {49},
number = {1},
pages = {17--29},
year = {2013},
url = {https://doi.org/10.1016/j.automatica.2012.09.002},
doi = {10.1016/J.AUTOMATICA.2012.09.002},
timestamp = {Thu, 20 Feb 2020 09:16:44 +0100},
biburl = {https://dblp.org/rec/journals/automatica/PanagouK13.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Maintaining visibility for leader-follower formations in obstacle environments.
ICRA
@inproceedings{DBLP:conf/icra/PanagouK12,
author = {Dimitra Panagou and
Vijay Kumar},
title = {Maintaining visibility for leader-follower formations in obstacle
environments},
booktitle = {{IEEE} International Conference on Robotics and Automation, {ICRA}
2012, 14-18 May, 2012, St. Paul, Minnesota, {USA}},
pages = {1811--1816},
publisher = {{IEEE}},
year = {2012},
url = {https://doi.org/10.1109/ICRA.2012.6224893},
doi = {10.1109/ICRA.2012.6224893},
timestamp = {Wed, 16 Oct 2019 14:14:51 +0200},
biburl = {https://dblp.org/rec/conf/icra/PanagouK12.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Control of nonholonomic systems using reference vector fields.
CDC/ECC
@inproceedings{DBLP:conf/cdc/PanagouTK11,
author = {Dimitra Panagou and
Herbert G. Tanner and
Kostas J. Kyriakopoulos},
title = {Control of nonholonomic systems using reference vector fields},
booktitle = {50th {IEEE} Conference on Decision and Control and European Control
Conference, 11th European Control Conference, {CDC/ECC} 2011, Orlando,
FL, USA, December 12-15, 2011},
pages = {2831--2836},
publisher = {{IEEE}},
year = {2011},
url = {https://doi.org/10.1109/CDC.2011.6160922},
doi = {10.1109/CDC.2011.6160922},
timestamp = {Wed, 24 Feb 2021 08:49:08 +0100},
biburl = {https://dblp.org/rec/conf/cdc/PanagouTK11.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Control of underactuated systems with viability constraints.
CDC/ECC
@inproceedings{DBLP:conf/cdc/PanagouK11,
author = {Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Control of underactuated systems with viability constraints},
booktitle = {50th {IEEE} Conference on Decision and Control and European Control
Conference, 11th European Control Conference, {CDC/ECC} 2011, Orlando,
FL, USA, December 12-15, 2011},
pages = {5497--5502},
publisher = {{IEEE}},
year = {2011},
url = {https://doi.org/10.1109/CDC.2011.6160925},
doi = {10.1109/CDC.2011.6160925},
timestamp = {Wed, 24 Feb 2021 08:49:08 +0100},
biburl = {https://dblp.org/rec/conf/cdc/PanagouK11.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Switching control approach for the robust practical stabilization of a unicycle-like marine vehicle under non-vanishing perturbations.
ICRA
@inproceedings{DBLP:conf/icra/PanagouK11,
author = {Dimitra Panagou and
Kostas J. Kyriakopoulos},
title = {Switching control approach for the robust practical stabilization
of a unicycle-like marine vehicle under non-vanishing perturbations},
booktitle = {{IEEE} International Conference on Robotics and Automation, {ICRA}
2011, Shanghai, China, 9-13 May 2011},
pages = {1525--1530},
publisher = {{IEEE}},
year = {2011},
url = {https://doi.org/10.1109/ICRA.2011.5979747},
doi = {10.1109/ICRA.2011.5979747},
timestamp = {Mon, 06 Nov 2017 12:15:03 +0100},
biburl = {https://dblp.org/rec/conf/icra/PanagouK11.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}Dipole-like fields for stabilization of systems with Pfaffian constraints.
ICRA
@inproceedings{DBLP:conf/icra/PanagouTK10,
author = {Dimitra Panagou and
Herbert G. Tanner and
Kostas J. Kyriakopoulos},
title = {Dipole-like fields for stabilization of systems with Pfaffian constraints},
booktitle = {{IEEE} International Conference on Robotics and Automation, {ICRA}
2010, Anchorage, Alaska, USA, 3-7 May 2010},
pages = {4499--4504},
publisher = {{IEEE}},
year = {2010},
url = {https://doi.org/10.1109/ROBOT.2010.5509296},
doi = {10.1109/ROBOT.2010.5509296},
timestamp = {Mon, 06 Nov 2017 12:15:02 +0100},
biburl = {https://dblp.org/rec/conf/icra/PanagouTK10.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}A viability approach for the stabilization of an underactuated underwater vehicle in the presence of current disturbances.
CDC
@inproceedings{DBLP:conf/cdc/PanagouMSLK09,
author = {Dimitra Panagou and
Kostas Margellos and
Sean Summers and
John Lygeros and
Kostas J. Kyriakopoulos},
title = {A viability approach for the stabilization of an underactuated underwater
vehicle in the presence of current disturbances},
booktitle = {Proceedings of the 48th {IEEE} Conference on Decision and Control,
{CDC} 2009, combined withe the 28th Chinese Control Conference, December
16-18, 2009, Shanghai, China},
pages = {8612--8617},
publisher = {{IEEE}},
year = {2009},
url = {https://doi.org/10.1109/CDC.2009.5400954},
doi = {10.1109/CDC.2009.5400954},
timestamp = {Fri, 04 Mar 2022 13:27:41 +0100},
biburl = {https://dblp.org/rec/conf/cdc/PanagouMSLK09.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}