Devansh Agrawal
Papers

Adaptive Ergodic Search with Energy-Aware Scheduling for Persistent Multi-Robot Missions
Autonomous Robots, Springer Nature
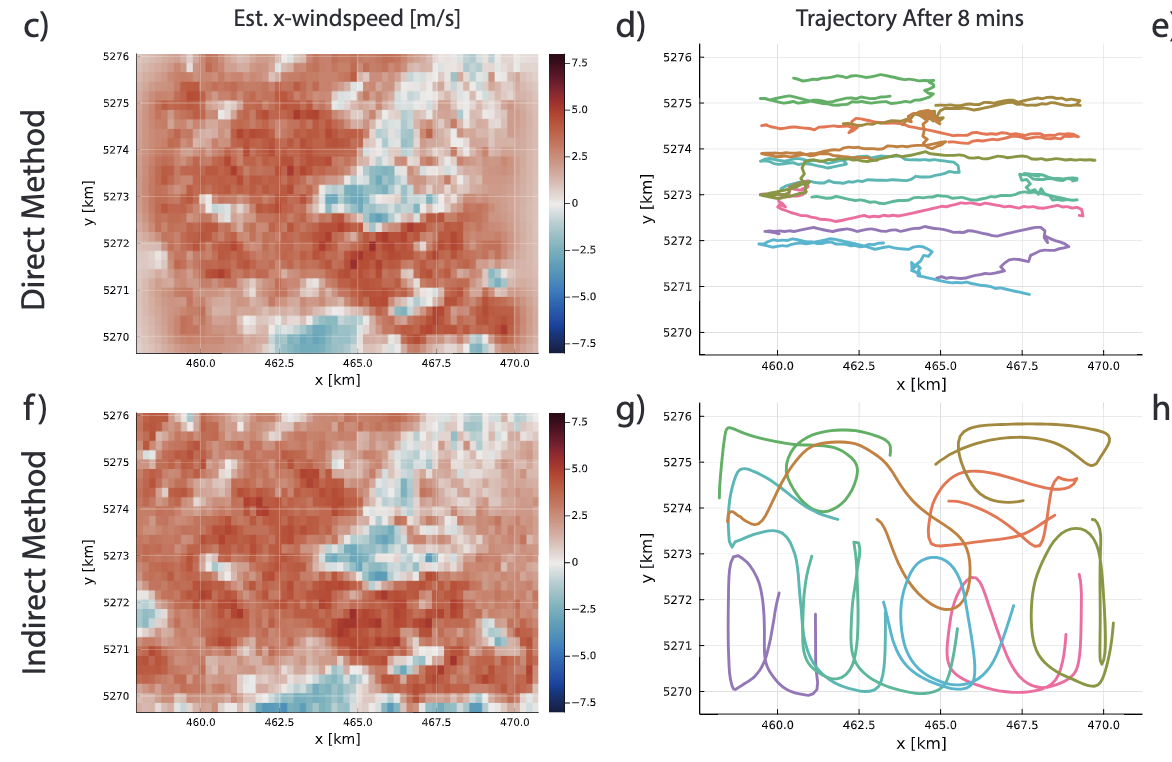
Fusion of Indirect Methods and Iterative Learning for Persistent Velocity Trajectory Optimization of a Sustainably Powered Autonomous Surface Vessel
IEEE Conference on Control Technology and Applications (CCTA) 2025
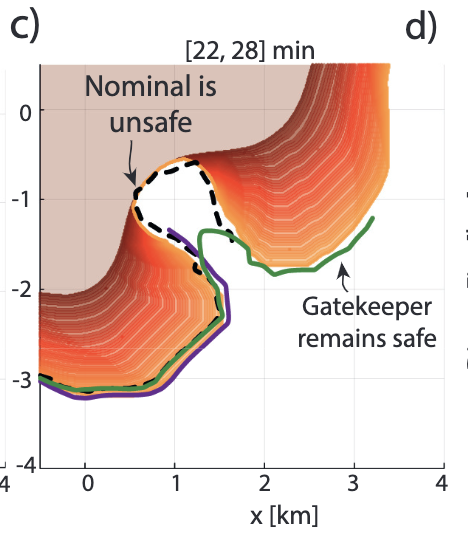
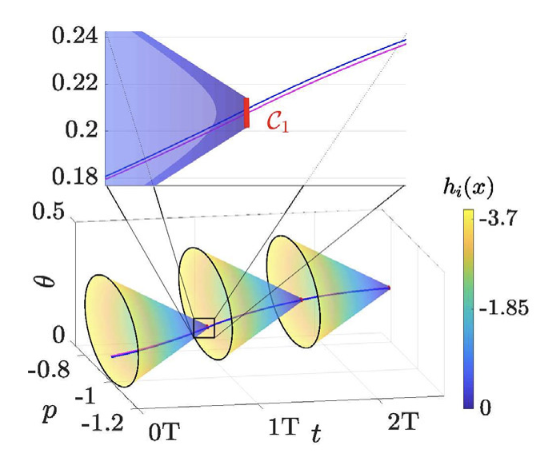
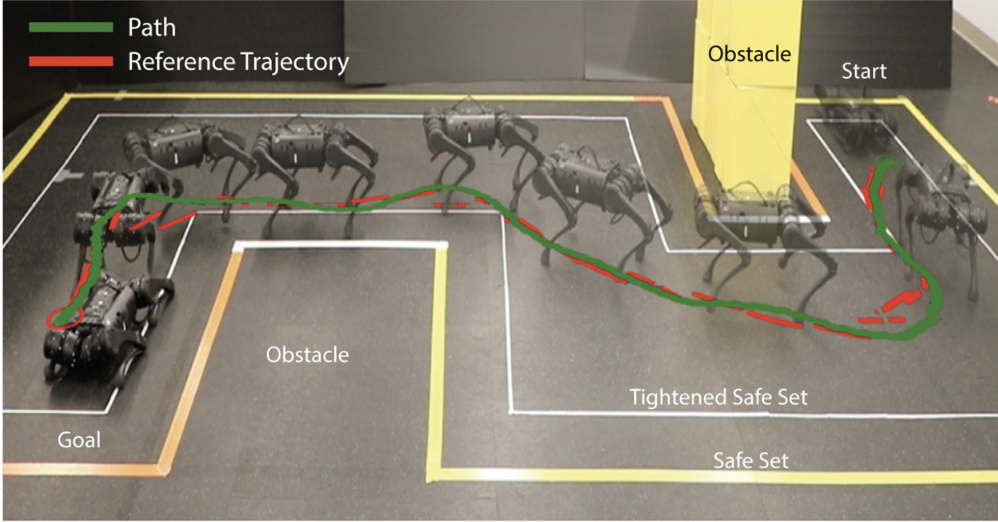
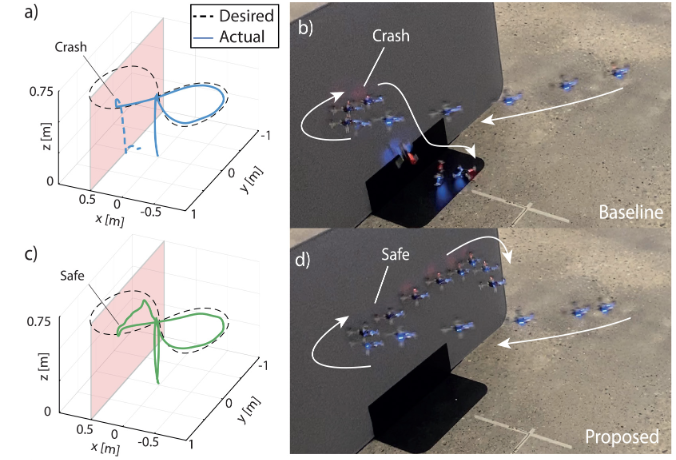
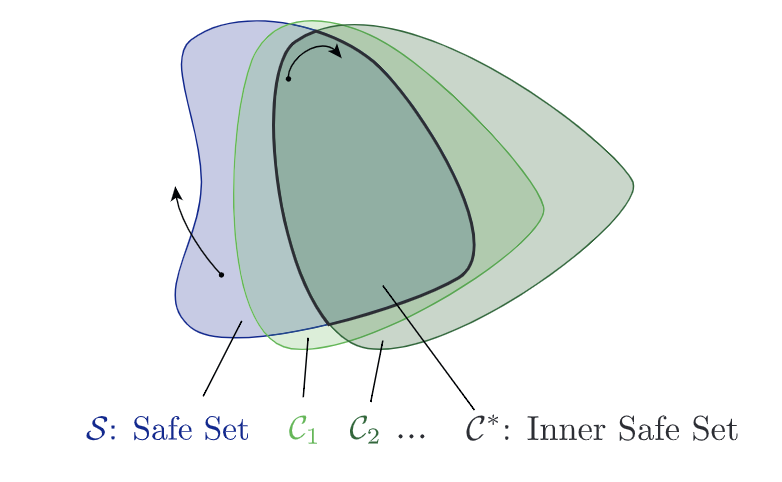
gatekeeper: Online Safety Verification and Control for Nonlinear Systems in Dynamic Environments
IEEE T-RO 2024
@inproceedings{agrawal2024gatekeeper,
title={gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments},
author={Agrawal, Devansh and Chen, Ruichang and Panagou, Dimitra},
booktitle={{IEEE Transactions on Robotics},
year={2024},
volume={40},
number={},
pages={4358-4375},
organization={IEEE}
}
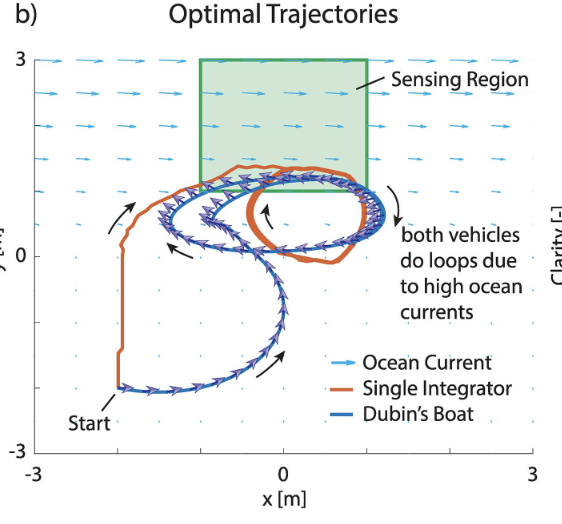
Eclares: Energy-Aware Clarity-Driven Ergodic Search
IEEE ICRA 2024
@inproceedings{naveed2024eclares,
title={Eclares: Energy-aware clarity-driven ergodic search},
author={Naveed, Kaleb Ben and Agrawal, Devansh and Vermillion, Christopher and Panagou, Dimitra},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={14326--14332},
year={2024},
organization={IEEE}
}
Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems
Annual Reviews in Control 2024
@article{garg2024advances,
title={Advances in the Theory of Control Barrier Functions: Addressing practical challenges in safe control synthesis for autonomous and robotic systems},
author={Garg, Kunal and Usevitch, James and Breeden, Joseph and Black, Mitchell and Agrawal, Devansh and Parwana, Hardik and Panagou, Dimitra},
journal={Annual Reviews in Control},
volume={57},
pages={100945},
year={2024},
publisher={Elsevier}
}gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments
IEEE IROS 2023
@inproceedings{agrawal2023gatekeeper,
title={gatekeeper: Online safety verification and control for nonlinear systems in dynamic environments},
author={Agrawal, Devansh and Chen, Ruichang and Panagou, Dimitra},
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={259--266},
year={2023},
organization={IEEE}
}
Sensor-based Planning and Control for Robotic Systems: Introducing Clarity and Perceivability
IEEE L-CSS and CDC 2023
@article{agrawal2023sensor,
title={Sensor-based planning and control for robotic systems: Introducing clarity and perceivability},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
year={2023},
publisher={IEEE}
}
A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
IEEE L-CSS and ACC 2022
@ARTICLE{9655322,
author={Agrawal, Devansh R. and Parwana, Hardik and Cosner, Ryan K. and Rosolia, Ugo and Ames, Aaron D. and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
title={A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems},
year={2022},
volume={6},
number={},
pages={2138-2143},
doi={10.1109/LCSYS.2021.3136465}
}
Safe and robust observer-controller synthesis using control barrier functions
IEEE L-CSS and CDC 2022
@article{agrawal2022safe,
title={Safe and robust observer-controller synthesis using control barrier functions},
author={Agrawal, Devansh R and Panagou, Dimitra},
journal={IEEE Control Systems Letters},
volume={7},
pages={127--132},
year={2022},
publisher={IEEE}
}
Safe Control Synthesis via Input Constrained Control Barrier Functions
IEEE CDC 2021
@INPROCEEDINGS{9682938,
author={Agrawal, Devansh R. and Panagou, Dimitra},
booktitle={2021 60th IEEE Conference on Decision and Control (CDC)},
title={Safe Control Synthesis via Input Constrained Control Barrier Functions},
year={2021},
volume={},
number={},
pages={6113-6118},
doi={10.1109/CDC45484.2021.9682938}
}