Predictive Velocity Trajectory Control for a Persistently Operating Solar-Powered Autonomous Surface Vessel
Code
Abstract
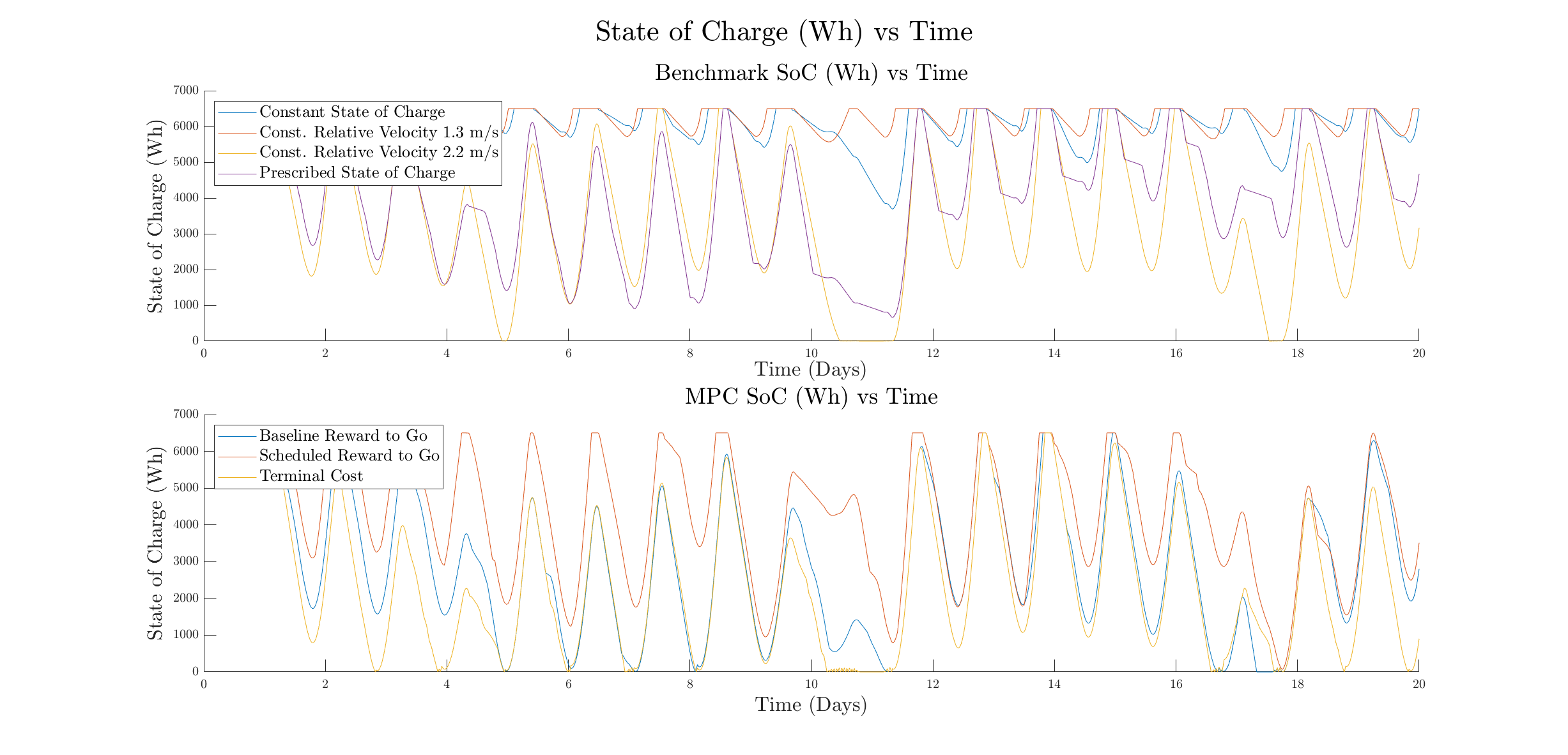
The Gulf Stream represents a major potential resource for renewable energy but is presently only sparsely characterized via radar, buoys, gliders, and intermittently op- erating human-operated research vessels. Dramatically greater resolution is possible through the use of persistently operating autonomous surface vessels (ASVs), which can be powered by wind, wave, or solar resources. Optimizing the control of these ASVs, taking into account the device and environmental properties, is crucial to obtaining good data. An ASV’s path and velocity profile along that path both significantly influence the amount of a mission domain that can be covered and, ultimately, the scientific quality of the mission. While our previous work focused on optimizing the path of a solar-powered ASV with fixed speed, the present work represents the complement: optimizing the speed for a given path, accounting for the ASV dynamics, flow resource, and solar resource. We perform this optimization through a model predictive controller that maxi- mizes the projected distance traversed, with a terminal incentive that captures the estimated additional long-duration range that is achievable from a given terminal battery state of charge. We present simulation results based on the SeaTrac SP-48 ASV, Mid-Atlantic Bight/South-Atlantic Bight Regional Ocean Model, and European Centre for Medium-Range Weather Forecasts solar model. Our results show improved performance relative to simpler heuristic controllers that aim to maintain constant speed or constant state of charge. However, we also show that the design of the MPC terminal incentive and design of the heuristic comparison controller can significantly impact the achieved performance; by examining underlying simulation results for different designs, we are able to identify likely causes of performance discrepancies.