Three papers accepted at IROS 2025
Three papers have been accepted at IROS 2025 (including one RA-L paper)! Check out: “meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence”, “Safe Navigation in Uncertain Crowded Environments Using Risk Adaptive CVaR Barrier Functions”, and “Visibility-Aware RRT* for Safety-Critical Navigation of Perception-Limited Robots in Unknown Environments” (RA-L).
Related Papers
meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence
IEEE/RSJ IROS 2025
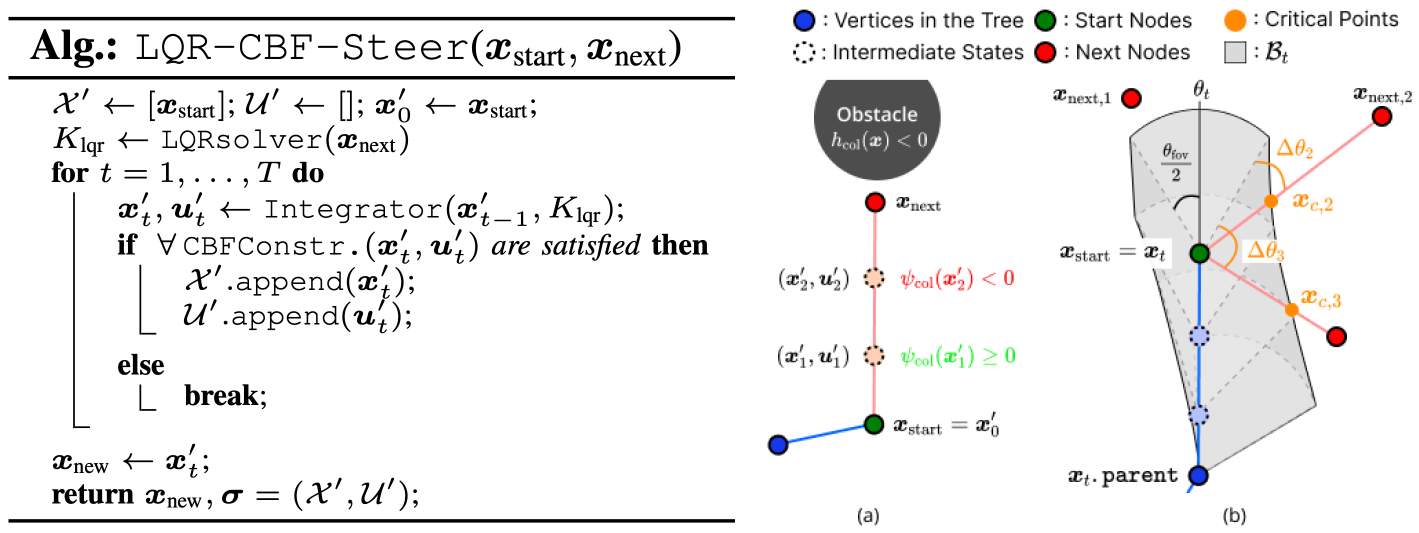
Visibility-Aware RRT* for Safety-Critical Navigation of Perception-Limited Robots in Unknown Environments
IEEE Robotics and Automation Letter 2025