Two papers accepted at ICRA 2025
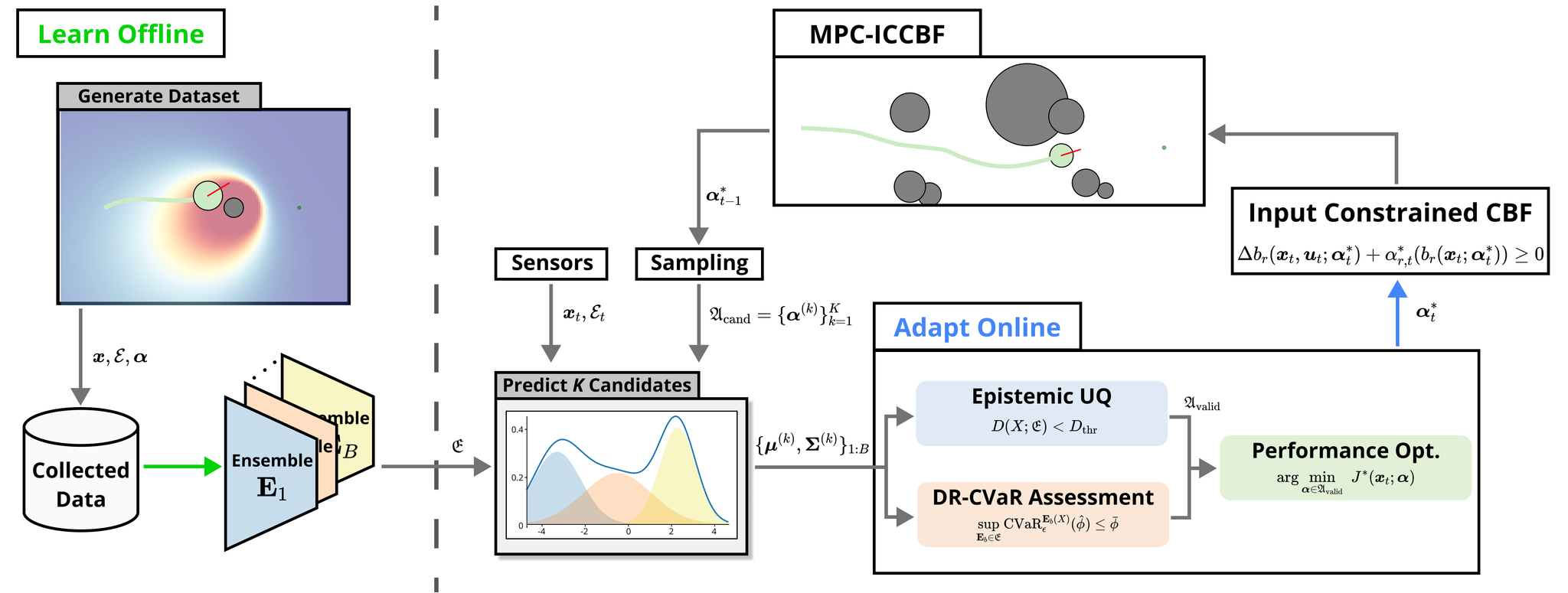
Our paper “Learning to Refine Input Constrained Control Barrier Functions via Uncertainty-Aware Online Parameter Adaptation” and “Maintaining Strong r-Robustness in Reconfigurable Multi-Robot Networks using Control Barrier Functions” have been accepted to IEEE ICRA 2025!
Related Papers