Four papers accepted at CDC 2024
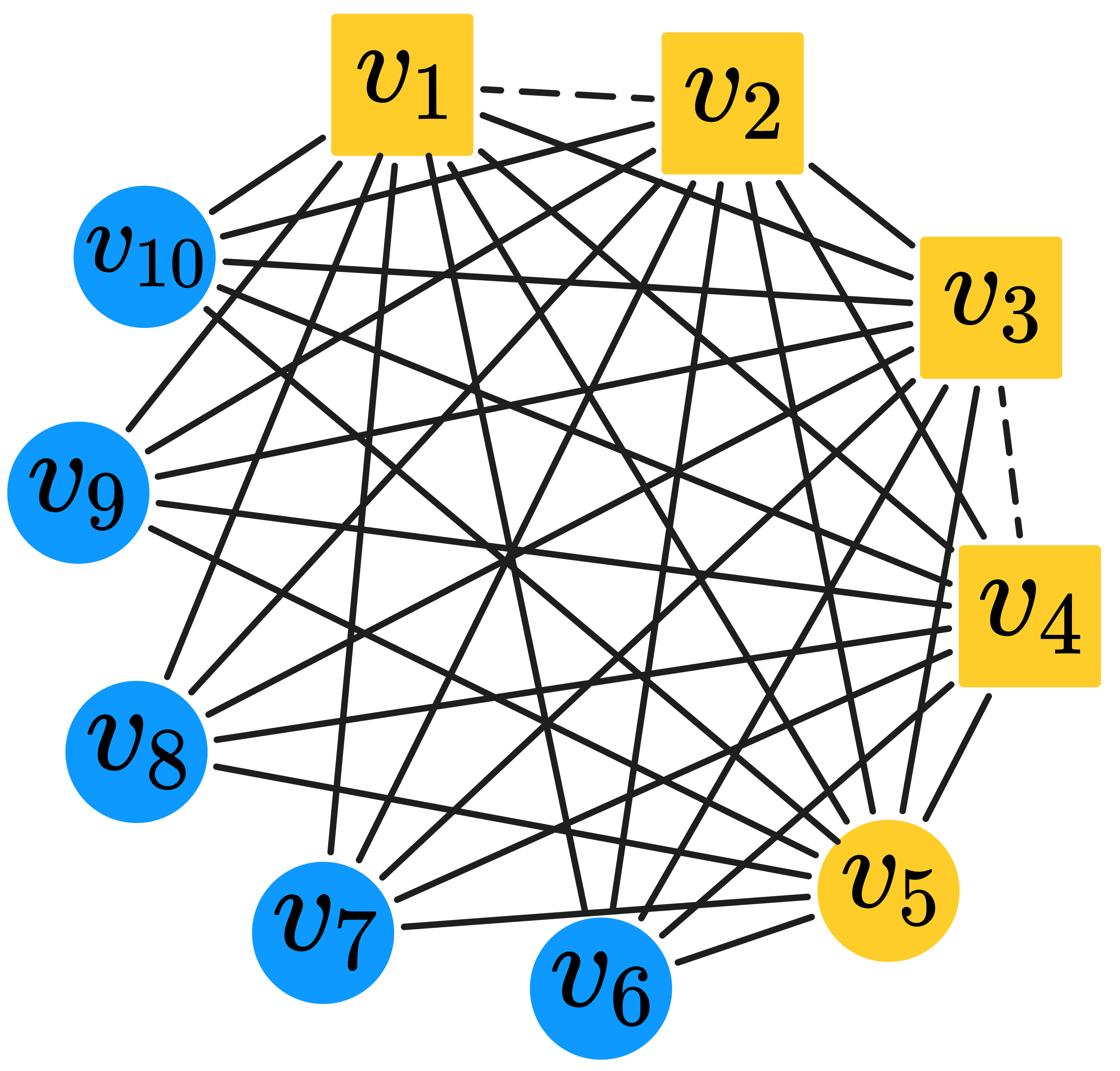
Four papers have been accepted at IEEE CDC 2024 (including one L-CSS paper)! Check out: “Construction of the Sparsest Maximally r-Robust Graphs”, “Multi-Agent Clarity-Aware Dynamic Coverage with Gaussian Processes”, “Safety-Aware Trajectory Tracking using High-Order Control Barrier Functions”, and “Robust Safety-Critical Control for Systems With Sporadic Measurements and Dwell-Time Constraints”.
Related Papers
Robust Safety-Critical Control for Systems With Sporadic Measurements and Dwell-Time Constraints
IEEE Control Systems Letteter 2024
@article{DBLP:journals/csysl/BreedenZP24,
author = {Joseph Breeden and
Luca Zaccarian and
Dimitra Panagou},
title = {Robust Safety-Critical Control for Systems With Sporadic Measurements
and Dwell-Time Constraints},
journal = {{IEEE} Control. Syst. Lett.},
volume = {8},
pages = {1415--1420},
year = {2024},
url = {https://doi.org/10.1109/LCSYS.2024.3410631},
doi = {10.1109/LCSYS.2024.3410631},
timestamp = {Fri, 19 Jul 2024 23:16:25 +0200},
biburl = {https://dblp.org/rec/journals/csysl/BreedenZP24.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}